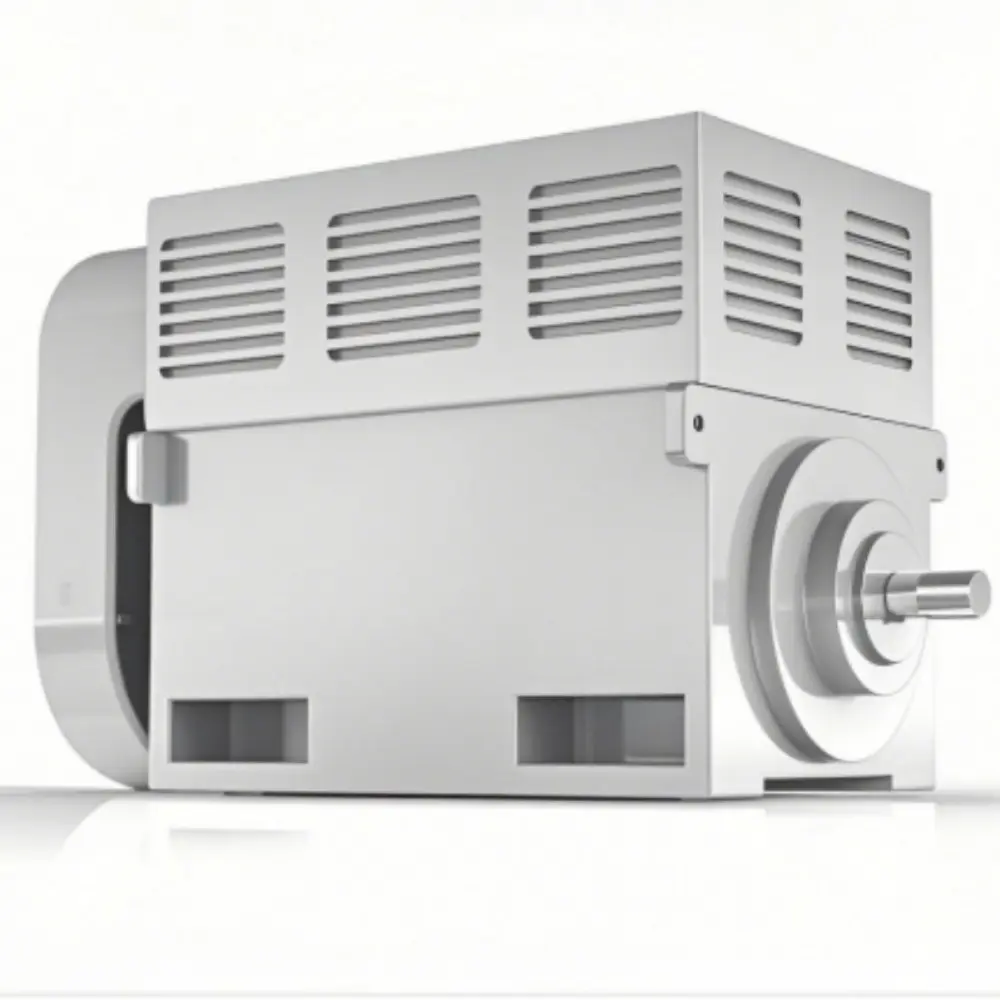
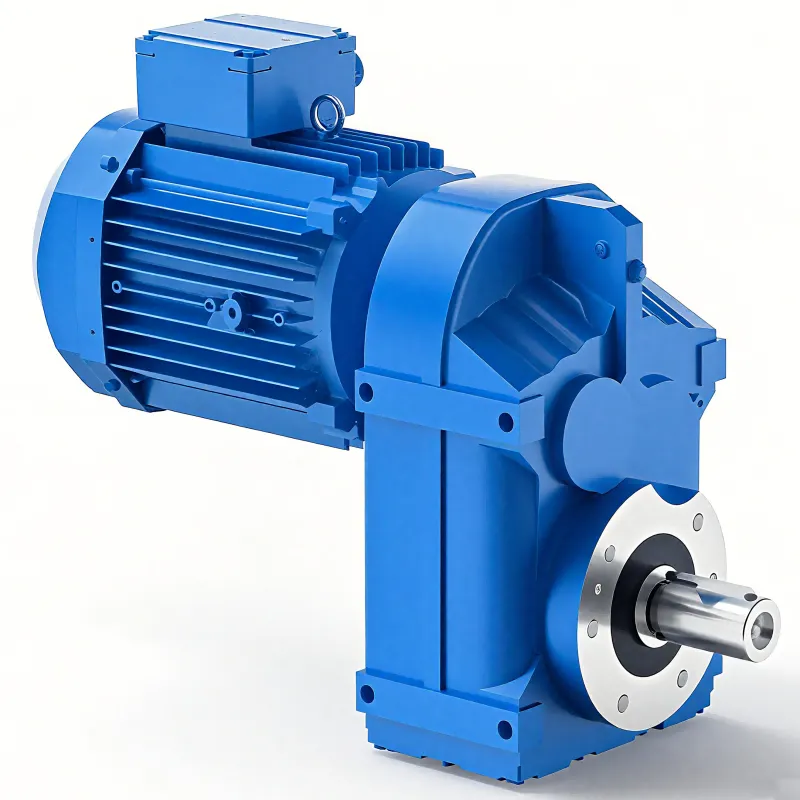
ასინქრონული და სინქრონული მოტორი
Ასინქრონული და სინქრონული მოტორები წარმოადგენენ ორ ფუნდამენტალურ ტიპს ელექტრო მოტორებისა, რომლებიც განსაზღვრული ინდუსტრიული აპლიკაციების მოძრავი ძალაა. ასინქრონული მოტორები, რომლებსაც ხშირად ინდუქციური მოტორები ეწოდებიან, მუშაობენ როთლის მაგნიტული ველის შექმნით, რომელიც ინდუსირებს მიმდინარე მიმართულებას როტორში, განათავსებული სიჩქარით, რომელიც ცოტა ქვემოთ არის სინქრონული სიჩქარისგან. სიჩქარის განსხვავება, რომელსაც სლიპი ეწოდება, ძალიან მნიშვნელოვანია მოტორის მუშაობისთვის. სინქრონული მოტორები, საწინააღმდეგოდ, როთლის მაგნიტულ ველის ექსაქტურ სიჩქარეზე როტირდებიან, მარტივი სინქრონულობა შეინახებიან როტორსა და სტატორს შორის. ეს მოტორები მასალად მოიცავენ მუდმივ მაგნიტებს ან ელექტრომაგნიტებს როტორის დიზაინში, რაც შესაძლებლობას აძლევს ზუსტი სიჩქარის კონტროლისა და უმეტეს ეფექტიურობის მიღებისა საშუალებული ტვირთების შემთხვევაში. ორივე მოტორის ტიპი სერვირებს განსხვავებულ მიზნებს ინდუსტრიულ აპლიკაციებში. ასინქრონული მოტორები გამოჩნდნენ აპლიკაციებში, სადაც საჭიროა მუშაობა განსხვავებული ტვირთების ქვეშ დამოკიდებული მიზნებით, როგორიცაა ტრანსპორტირების სისტემები, პუმპები და ვენტილატორები. სინქრონული მოტორები მათთვის ნიჭში არიან აპლიკაციებში, სადაც საჭიროა ზუსტი სიჩქარის კონტროლი და მაღალი ეფექტიურობა, როგორიცაა ინდუსტრიული პროცესები, დიდი კომპრესორები და ზუსტი მწარმოების მანქანები. ტექნოლოგიური განვითარებები ძალების ელექტრონიკაში და კონტროლის სისტემებში მაღალი განავითარეს ორივე მოტორის ტიპის შესაძლებლობებს, შესაძლებლობას მისცენ ცვლადი სიჩქარის მუშაობასა და გაუმჯობეს ენერგიის ეფექტიურობას.