ბრუსლეს დიც მოტორი ტორქი
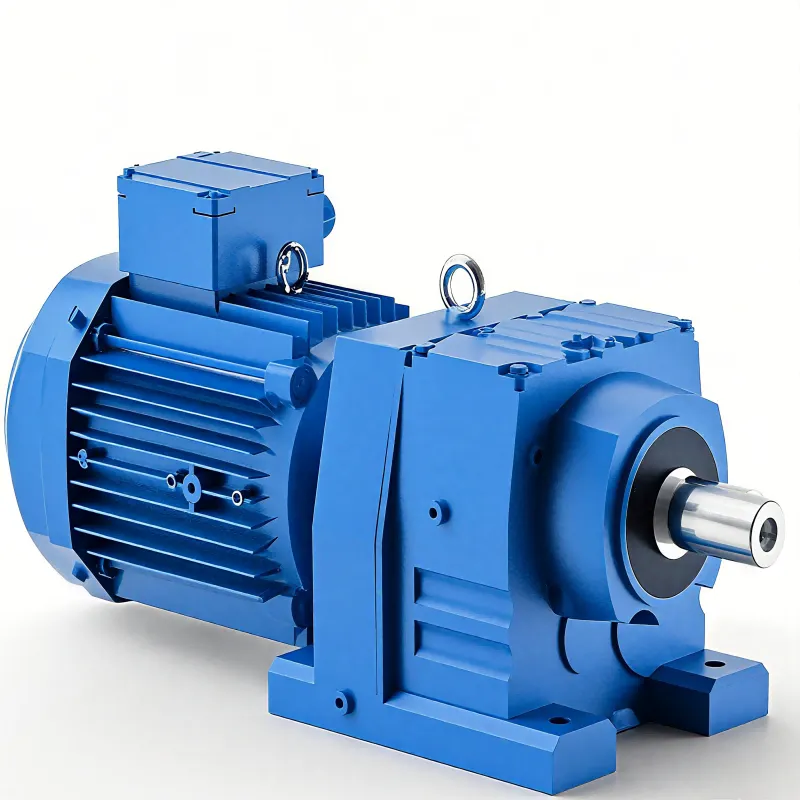
Ბრუსლეს დისი მოტორის ტორქი წარმოადგენს ძველ მოცემულ ასპექტს სამოდერნო ელექტრომოტორულ ტექნოლოგიისა, სადაც განხილული კონტროლი და ეფექტური ძალის გარდაქმნა შესაძლებელია. ამ მოდერნულ მოტორულ სისტემაში როტაციული ძალა წარმოდგენილია ელექტრომაგნიტული ინტერაქციით მუდმივი მაგნიტებსა და ელექტრონულად კონტროლირებულ სტატორის ჩრდილოებს შორის. ტორქის გამოსავალი უზრუნველყოფილია მუდმივად მუშაობის დიაპაზონში, რაც უზრუნველყოფს გარკვეულ და მოსავალი მუშაობას, გარეშე ტრადიციული ბრუსილი მოტორების მექანიკური შეზღუდვების. სისტემა იყენებს სოფისტიკაცია ელექტრონული კომუტაციას, გამოიყენებს პოზიციის სენსორებსა და კონტროლის ალგორითმებს ტორქის გამოსავალის გაუმჯობეს. ამ კონფიგურაციაში შესაძლებელია განსხვავებული სიჩქარის კონტროლი, მინიმალური მექანიკური მონაცემები და უფრო ეფექტური მუშაობა შედარებით ტრადიციულ მოტორულ დიზაინებს. მოტორის შესაძლებლობა მუდმივი ტორქის მარტივი მუშაობის გარეშე განსხვავებული სიჩქარის დიაპაზონში ხდის მას იდეალურად შესაბამისად აპლიკაციებში, სადაც საჭიროა განსაკუთრებით მოსავალი მოცემული კონტროლი. ინდუსტრიულ გარემოში, ეს მოტორები გამოჩნდნენ ავტომატურ მწარმოებაში, რობოტიკაში და პრეციზიულ მაशინებში. ავტომობილების სექტორი განსაკუთრებით გამოიყენებს ბრუსლეს დისი მოტორის ტორქს ელექტროავტომობილებში და ძალის სტერინგ სისტემებში. გამომდინარეობს, რომ ეს მოტორები მოიძებნენ აპლიკაციებში ავიაციაში, მედიკალურ მოწყობილობებში და საუკეთესო კონსუმერულ ელექტრონიკაში, სადაც მოსავალი ტორქის წარმოდგენა ძველია. სისტემის დიზაინი გაუმარტივებს ფიზიკური ბრუსების გამოყენებას, რაც შემცირებს გამომდინარე და მუშაობის განზომილებას.