động cơ không đồng bộ và động cơ đồng bộ
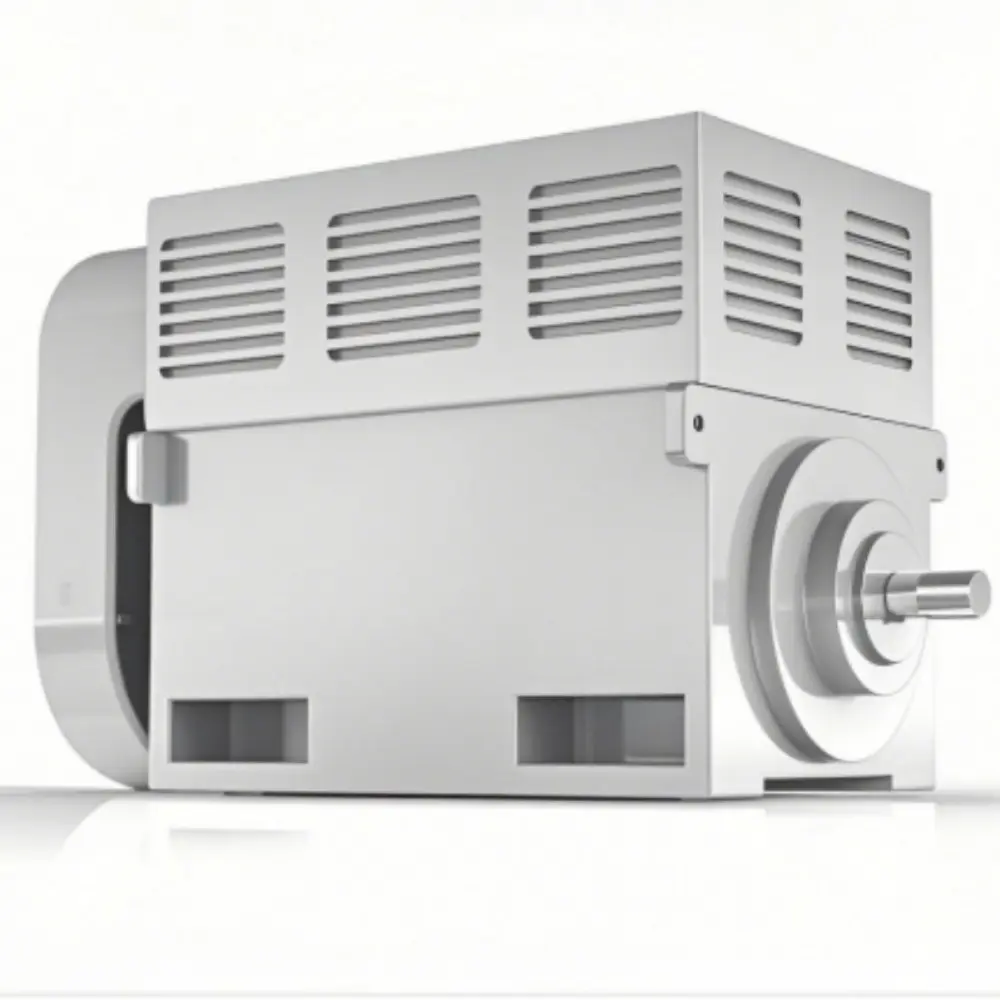
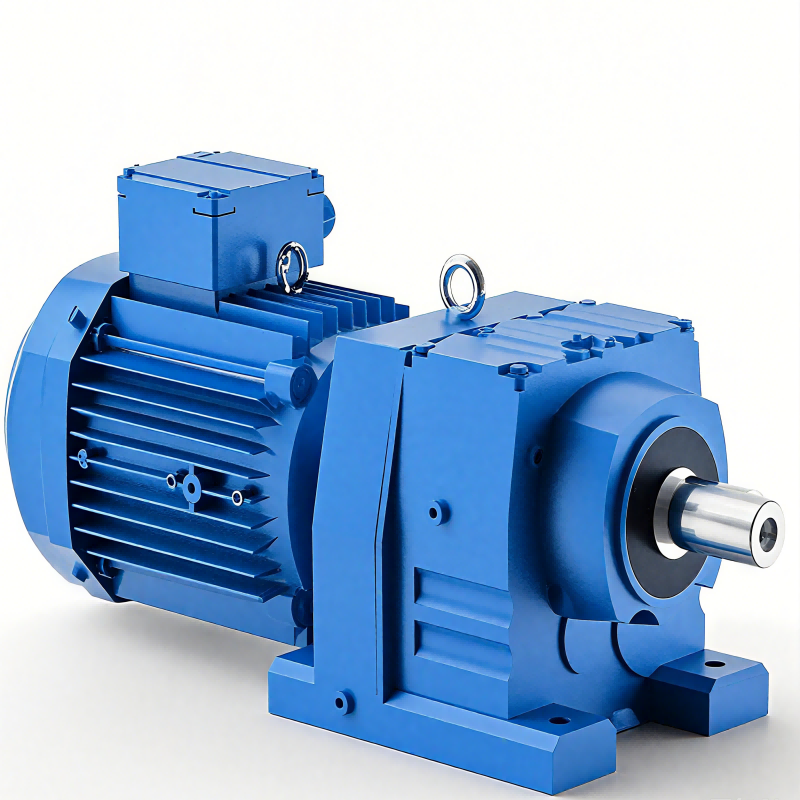
Mô-tơ không đồng bộ và mô-tơ đồng bộ là hai loại cơ bản của mô-tơ điện AC, cung cấp năng lượng cho nhiều ứng dụng công nghiệp khác nhau. Mô-tơ không đồng bộ, còn được gọi là mô-tơ cảm ứng, hoạt động dựa trên nguyên lý cảm ứng điện từ giữa stato và rô-to. Tốc độ của rô-to thấp hơn một chút so với tốc độ đồng bộ, tạo ra sự chênh lệch tốc độ được gọi là trượt. Các mô-tơ này được sử dụng rộng rãi trong máy móc công nghiệp, bơm và quạt do cấu trúc đơn giản và độ tin cậy cao. Ngược lại, mô-tơ đồng bộ hoạt động ở tốc độ cố định đồng bộ với tần số nguồn điện. Trường từ của rô-to xoay với tốc độ chính xác bằng với tốc độ của trường từ quay của stato. Chúng xuất sắc trong các ứng dụng yêu cầu kiểm soát tốc độ chính xác và hiệu suất cao, chẳng hạn như các hệ thống truyền động công nghiệp lớn, máy phát điện và thiết bị dây chuyền sản xuất. Cả hai loại mô-tơ đều có cấu trúc vững chắc với các thành phần chính bao gồm stato, rô-to, trục và bạc đạn. Sự khác biệt công nghệ chính nằm ở cơ chế kiểm soát tốc độ và đặc tính hệ số công suất, với mô-tơ đồng bộ cung cấp khả năng hiệu chỉnh hệ số công suất tốt hơn và kiểm soát tốc độ chính xác hơn, trong khi mô-tơ không đồng bộ cung cấp mô-men khởi động tốt hơn và yêu cầu bảo trì đơn giản hơn.