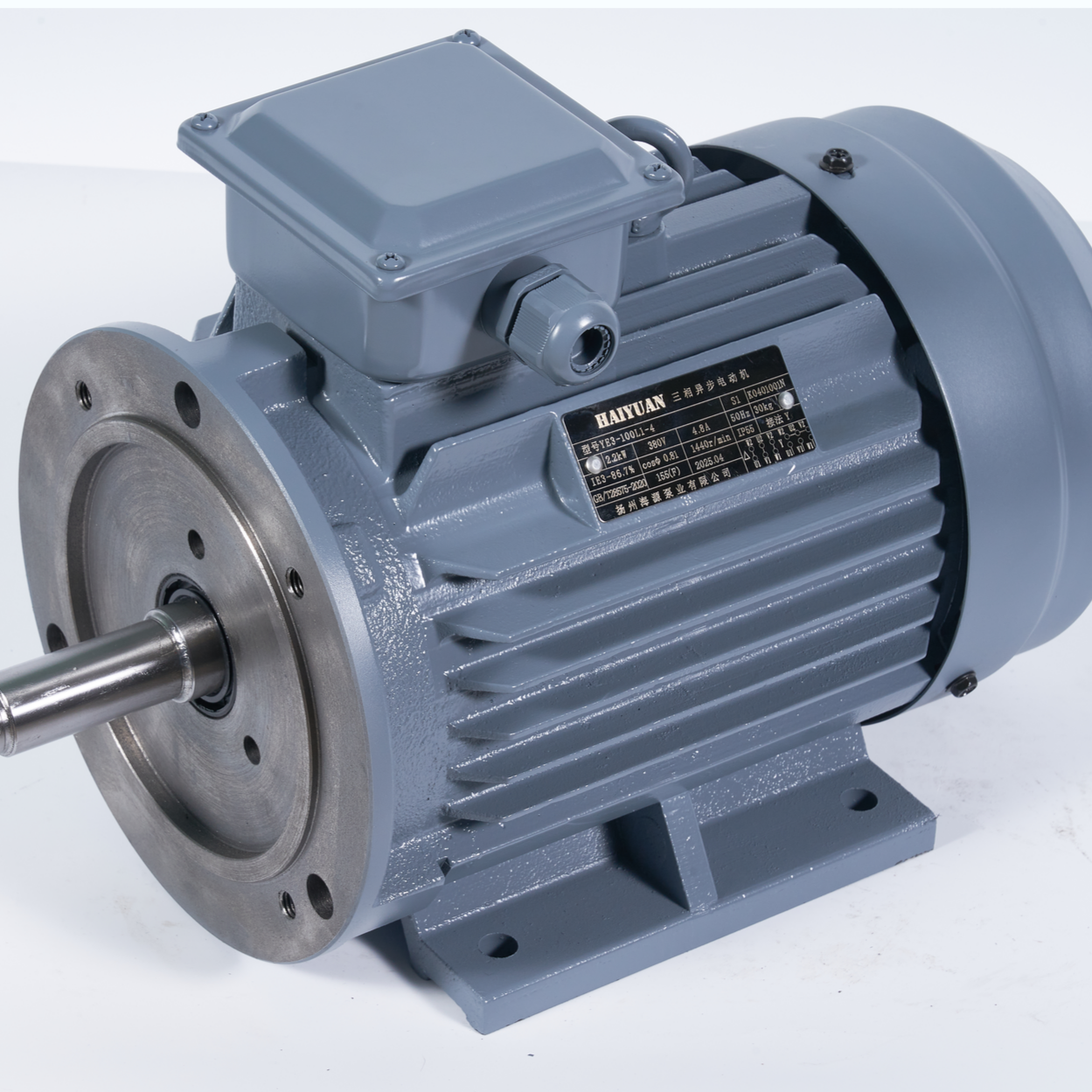
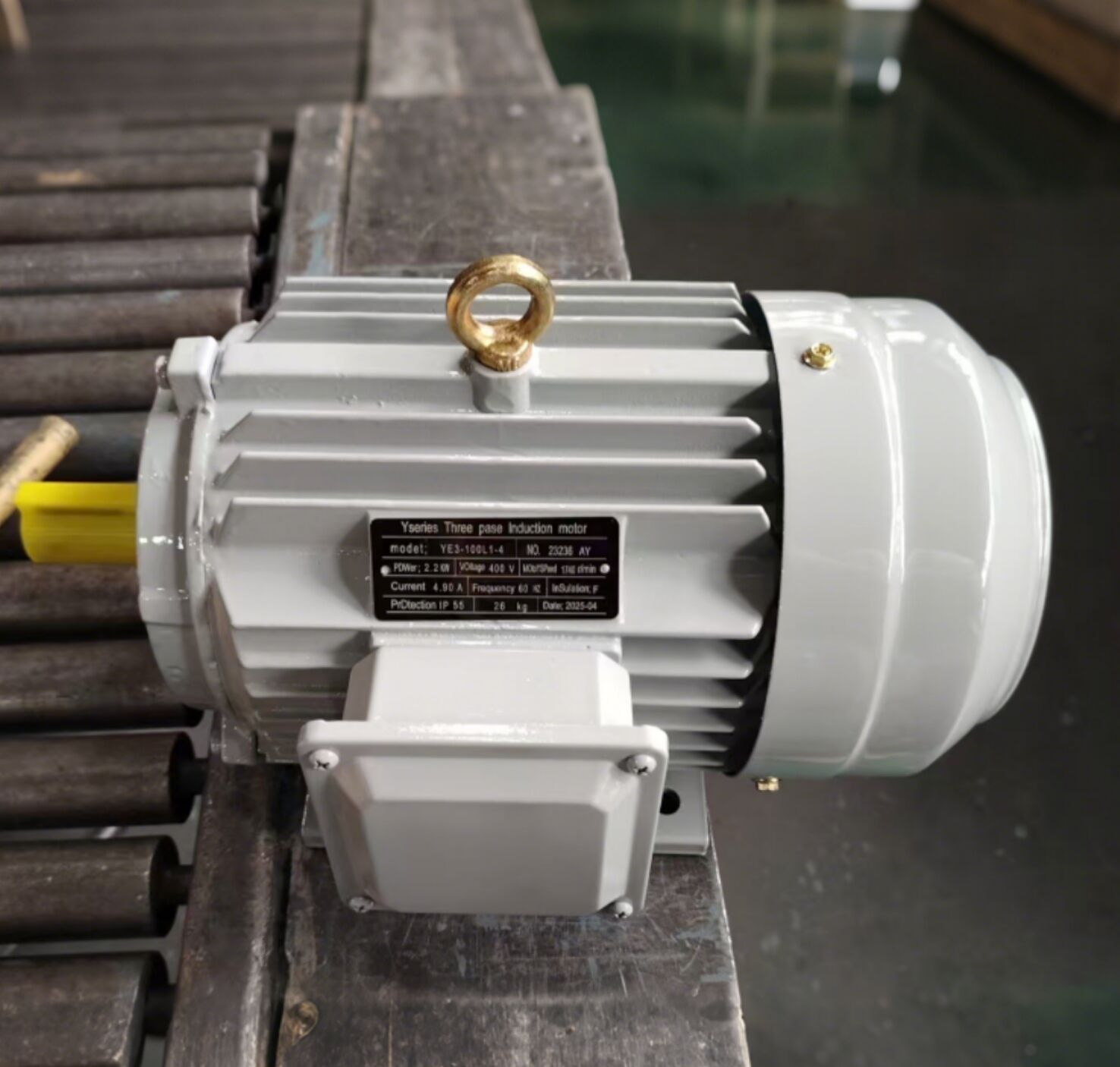
ардуино үйлдэгчийг зохицуулах
Ардуино серво нягын бүтэц нь роботики ба автоматик хийхэд үндсэн томоохон эрэмбэ төстэй бөгөөд, ихэвчлэн хэрэглэгчидтой зорилгоотой өнцгийн байрлалыг шуурхайлж чаддаг. Энэ бүтэц нь Ардуино-ийн их санах microcontroller систем болон серво моторыг холбоход 0-180 өнцгийн хязгаар дотор шуурхайлж ажилладаг. Систем нь PWM (pulse-width modulation) сигналыг ашиглан серво моторт зорилгоотой байрлалыг илгээхэд ашигладаг. Ардуино серво нягын бүтэц нь гурван үндсэн хэсэгт хамаарч байна: операцийн гол хэсэг болох Ардуино дос, үйл ажиллагааг явуулдаг серво мотор болон тэдгээрийн хоорондох холболтыг зохицуулдаг програм хангамж. Энэ системийн ихэнх утга нь гадны хүчээрээ байрлалыг хадгалж чаддаг бөгөөд, энэ нь шуурхайлж ажиллахад зориулж байгаа гарчигтай. Систем нь таслалтай үзүүлэх болон стандарт серво моторуудыг хамгийн их хэрэглэдэг. Хэрэглэгчид програмчлагчдын тусгай үгсийг ашиглан байрлалыг шуурхайлж чаддаг бөгөөд систем нь анхны үнэ цэнэтэйгээр шуурхайлж үзүүлдэг. Ардуино серво нягын бүтэц нь хобби роботикийн ажилуудаас эхлээд профессионалын автоматик систем, түмнэлтэй барих зам, зөвлөмжтэй бүтээгдэхүүний бүтээгчдэд ашигладаг.