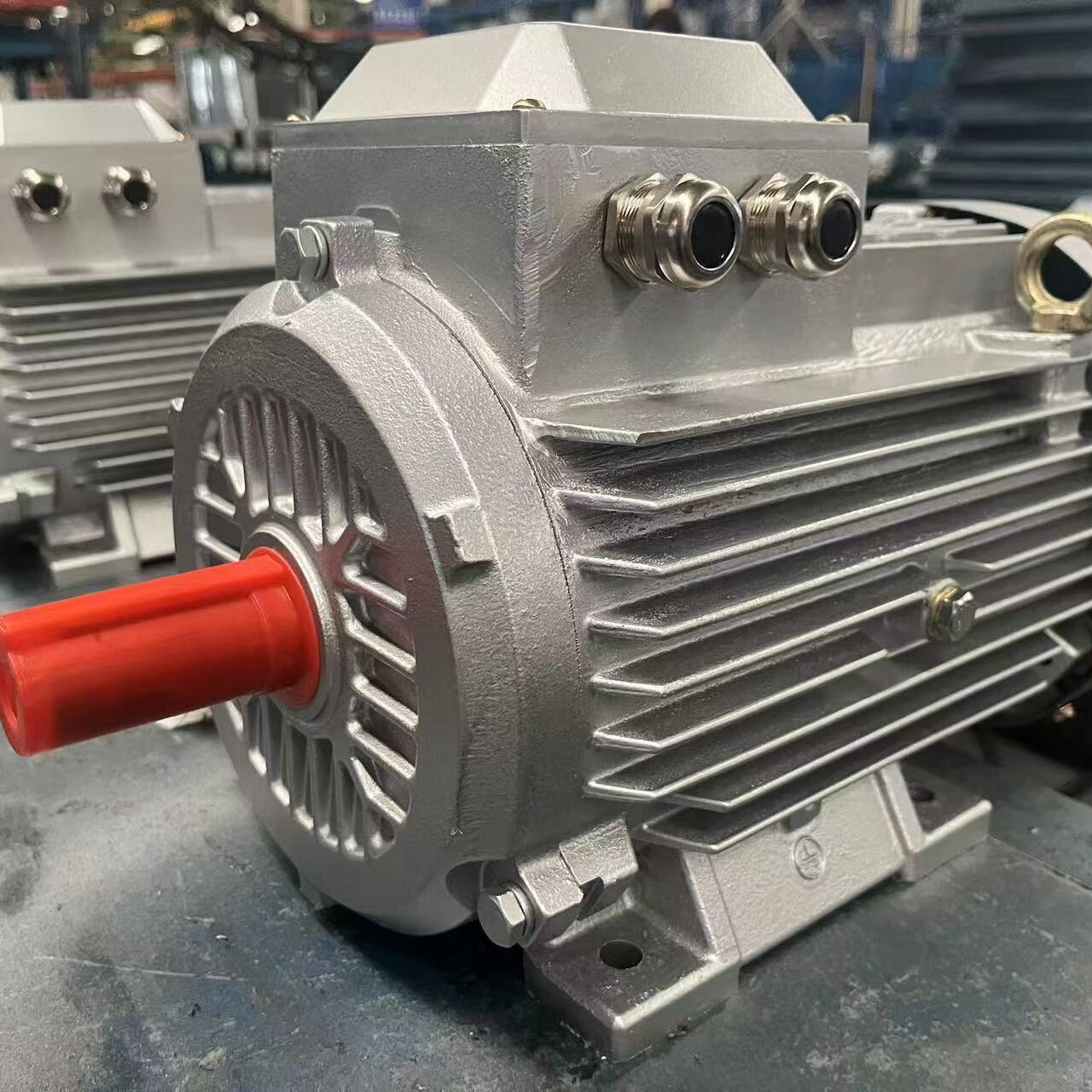
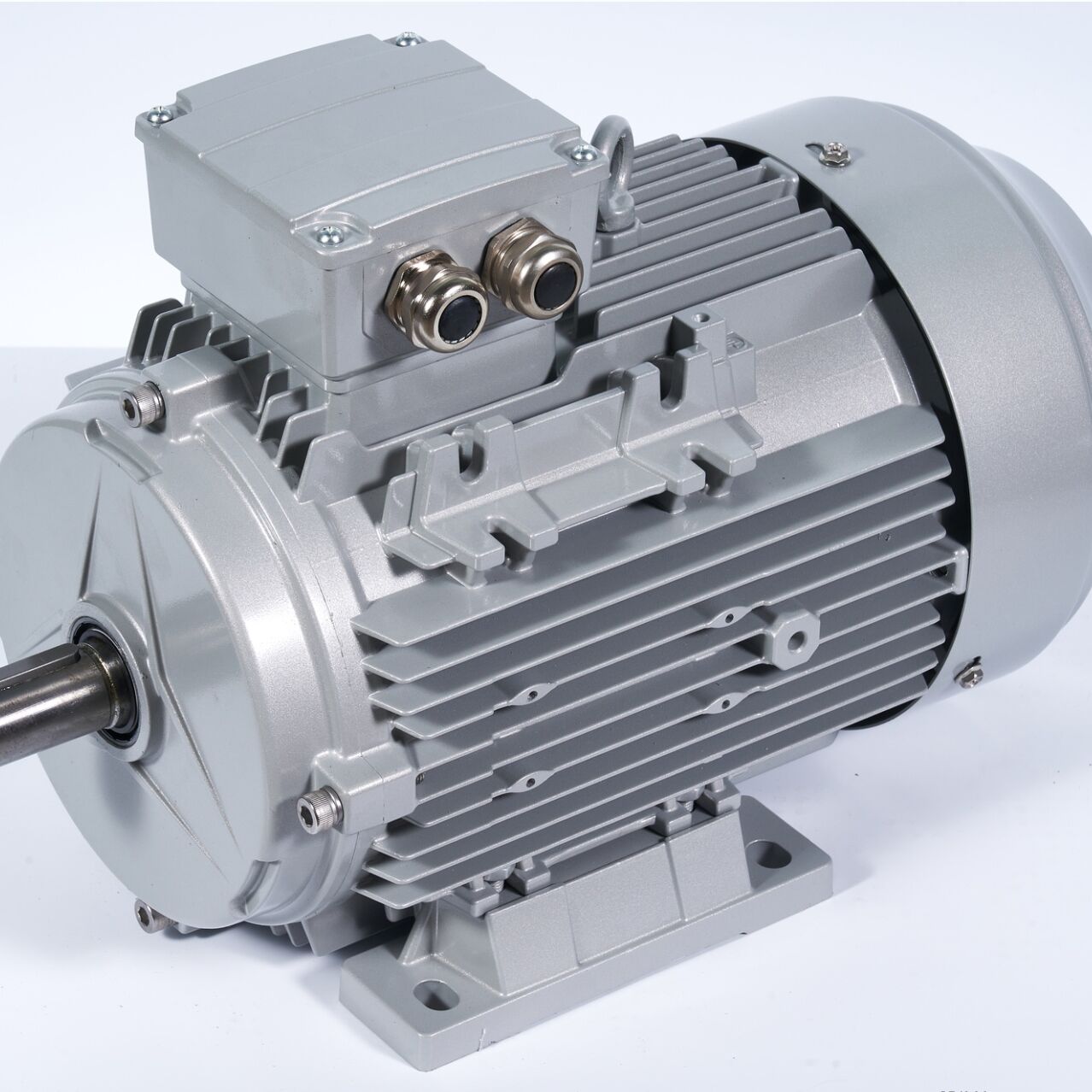
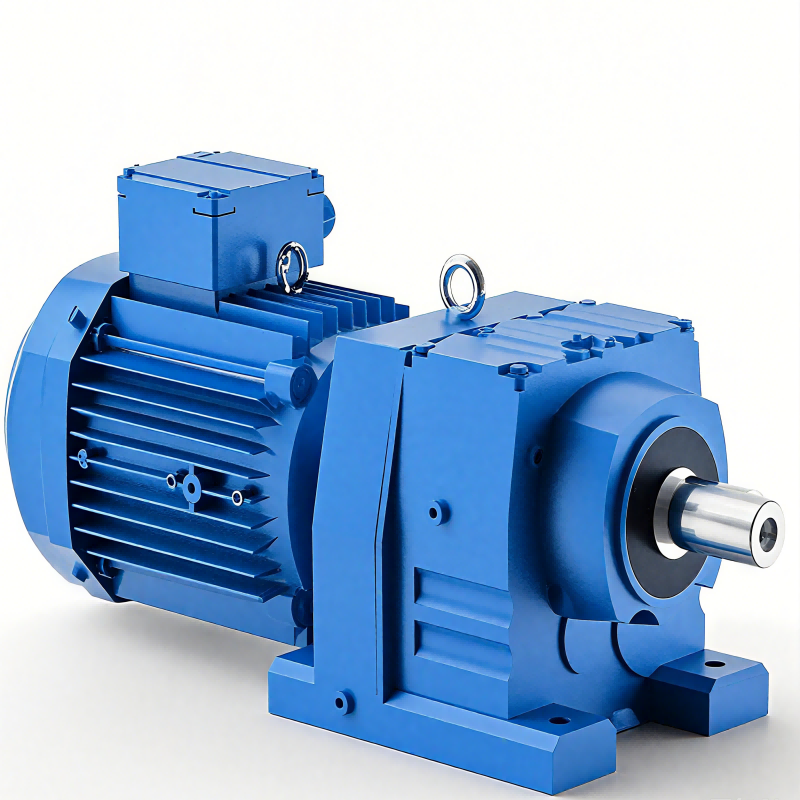
موتور سروی ربات
موتور سروی ربات یک دستگاه الکترومکانیکی پیچیده است که به عنوان نیروی محرکه حرکات دقیق رباتها و سیستمهای خودکار عمل میکند. این سیستم موتور پیشرفته ترکیبی از تواناییهای موقعیتیابی دقیق و مکانیسمهای کنترل بازخورد است که کنترل دقیق سرعت، شتاب و موقعیت را فراهم میآورد. موتور از طریق یک سیستم کنترل حلقه بسته عمل میکند که با استفاده از بازخورد انکودر موقعیت خود را به صورت مداوم بررسی و تنظیم میکند، که دقت بیسابقهای در کنترل حرکت ایجاد میکند. موتورهای سروی مدرن معمولاً ویژگیهای پیشرفتهای مانند نظارت داخلی بر دما، محافظت در برابر بارگذاری زائد و توابع یادداشت موقعیت را ادغام میکنند. این موتورها میتوانند در دامنه گستردهای از سرعتها با حفظ خروجی گشتاور ثابت عمل کنند، که آنها را مناسب جهت کاربردهایی که نیازمند هم قدرت و هم دقت هستند میسازد. این فناوری شامل مولفههای متعددی مانند واحد موتور، انکودر، راننده و مدار کنترل است که همه به طور هماهنگ برای تحویل خروجی مکانیکی دقیق کار میکنند. موتورهای سروی ربات کاربردهای گستردهای در مختلف صنایع دارند، از خطوط تولید و مونتاژ تا تجهیزات پزشکی و سیستمهای فضایی. آنها در وظایفی که نیازمند حرکات تکراری، موقعیتیابی دقیق و اعمال نیروی کنترلشده هستند، برتری دارند و اجزای ضروری در روباتیک مدرن و راهحلهای خودکارسازی هستند.