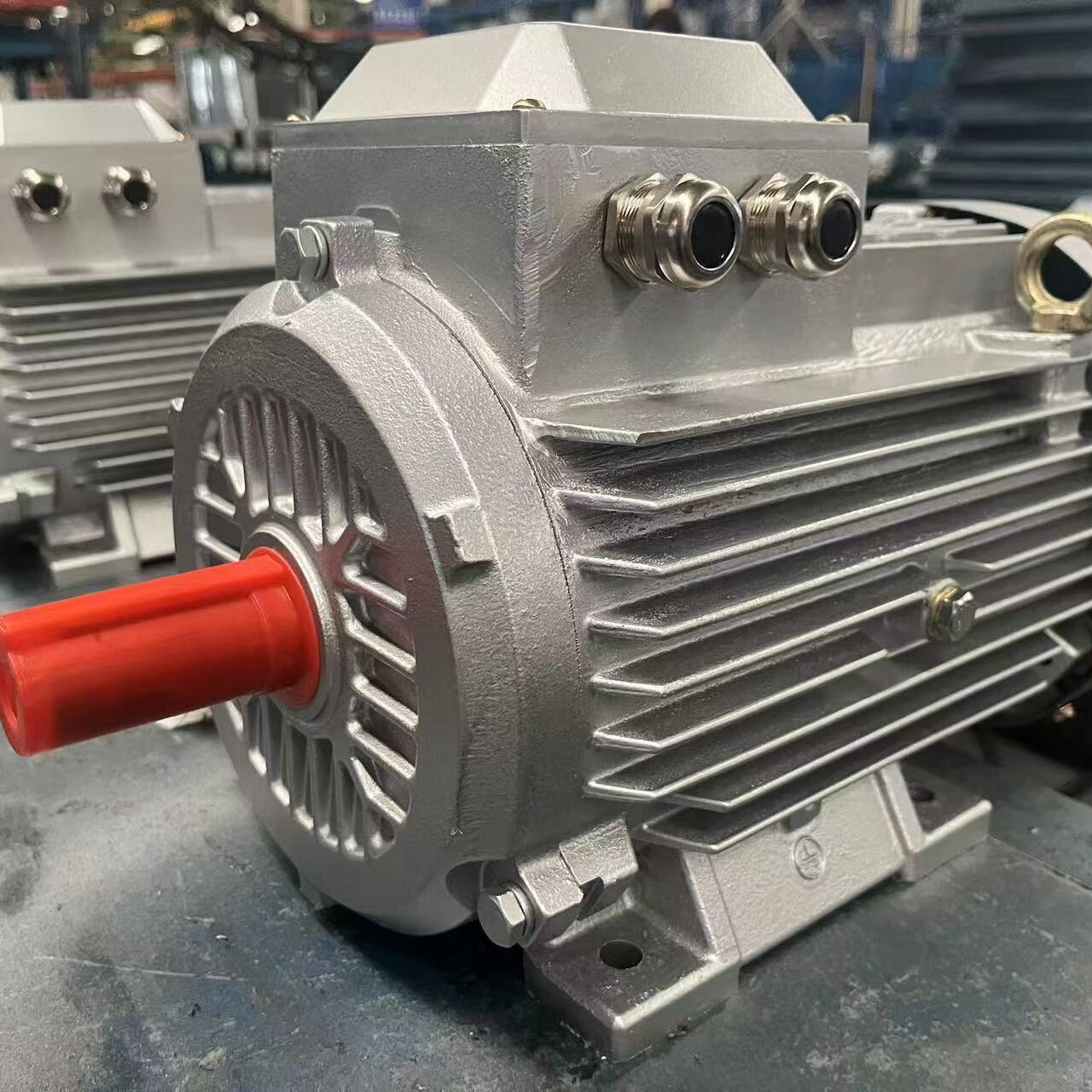
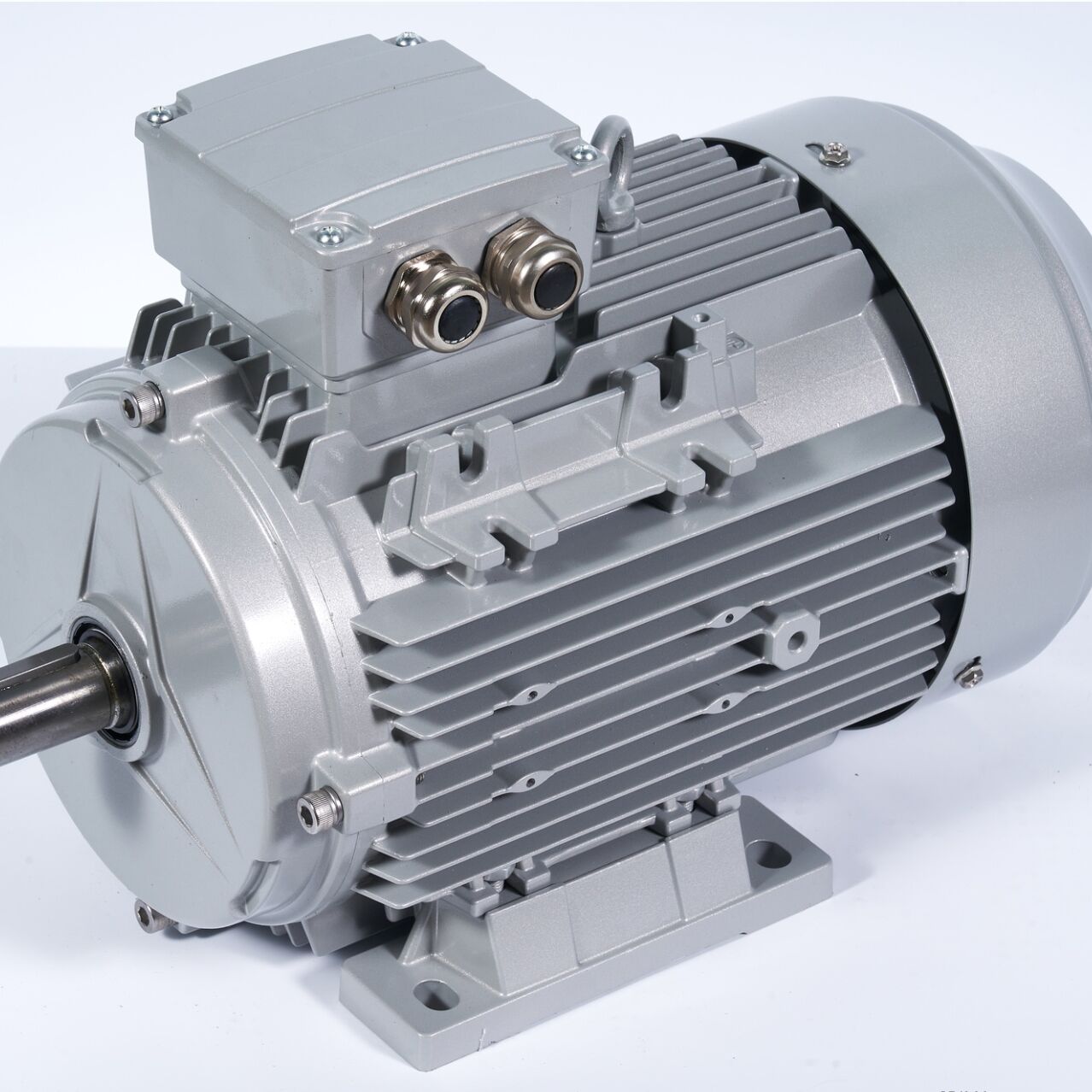
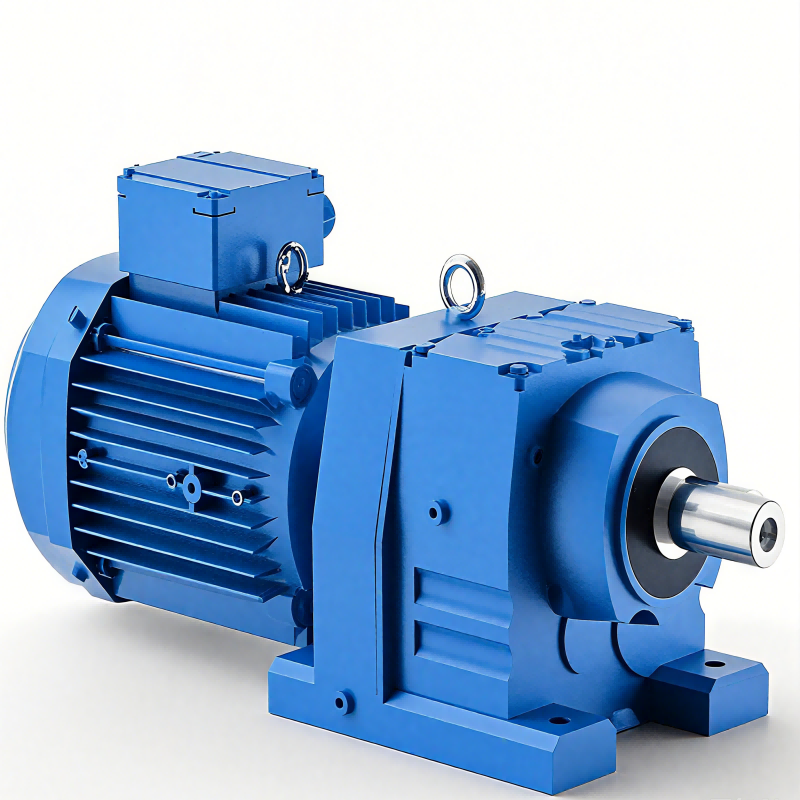
motor servus robotis
Motor servoroboticus est instrumentum electromechanicum sophisticatum quod fungitur ut vis motrix praecisorum motuum roboticorum et systematum automationis. Hoc systema motorium praecisionem positionis cum mechanicis retroactionis controllo combinat, praebens exactum controllem super velocitatem, accelerationem et positionem. Motor per systemam controllem circuli clausi operatur, quae continuo monitorat et ajustat suam positionem usque ad feedback codicis, certificans incredibilem praecisionem in controlle motus. Motores servorobotici moderni saepe integrant characteristicas aversas, sicut internam supervisionem caloris, protectionem surcargae, et functiones memoriae positionis. Hi motores possunt operari inter latam rangem velocitatum dum consistens exitus torquii conservatur, eos facientes idoneos pro applicationibus requirientibus et vim et praecisionem. Technologia plures componentes complectitur, inclusive unitatis motoriae, codicis, impulsoris, et circuitus controllem, omnes in harmonia laborantes ad praebendam praecisam exitum mechanicam. Motores servorobotici inveniunt extensas applicationes inter varias industrias, a fabricatione et lineis conglutinationis ad apparatus medicinales et systema aerospacia. Illi excellunt in taskis requirientibus motus repetitos, praecisam positionem, et applicationem virium controllatam, eos facientes componentibus essentialibus in robotica et solutionibus automationis modernis.