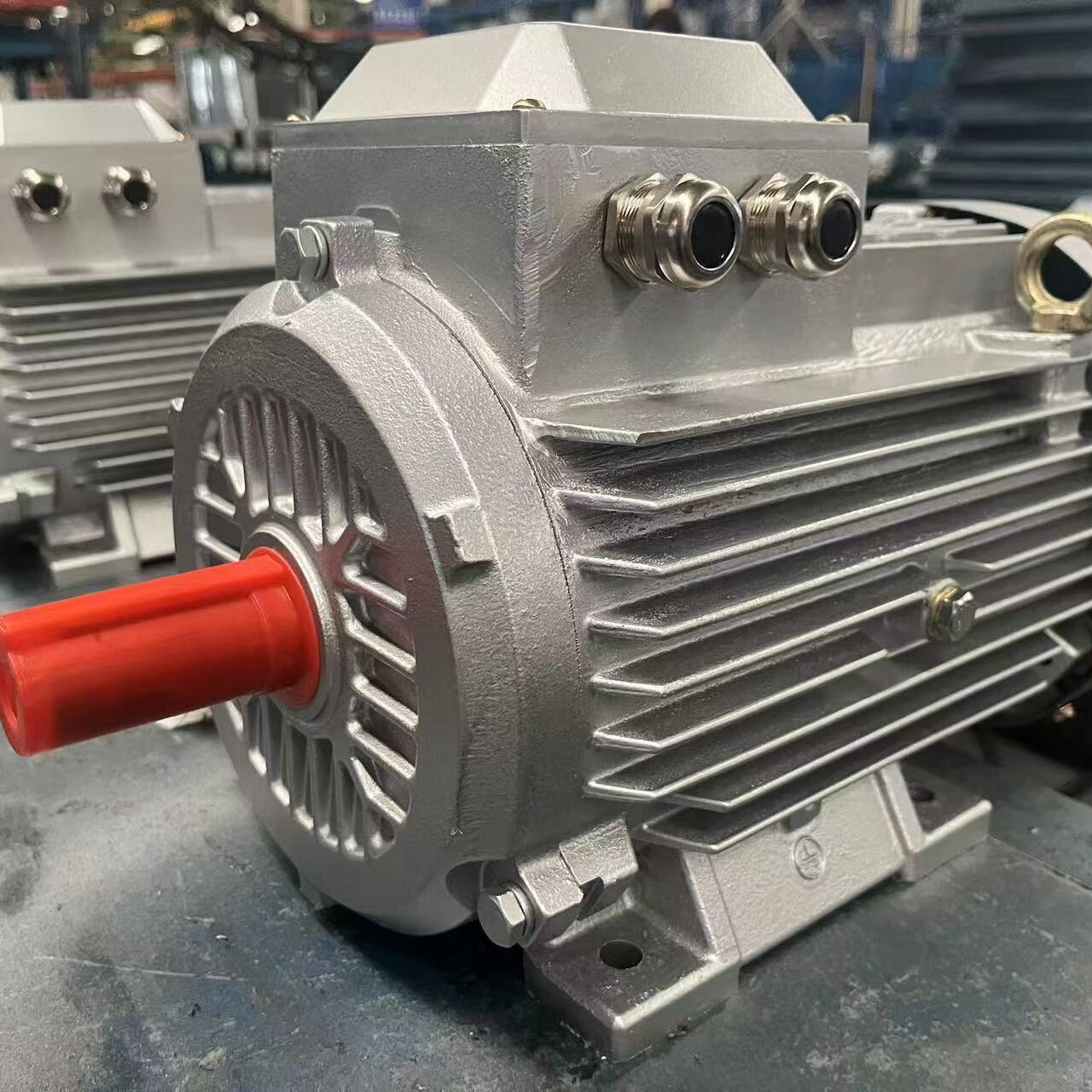
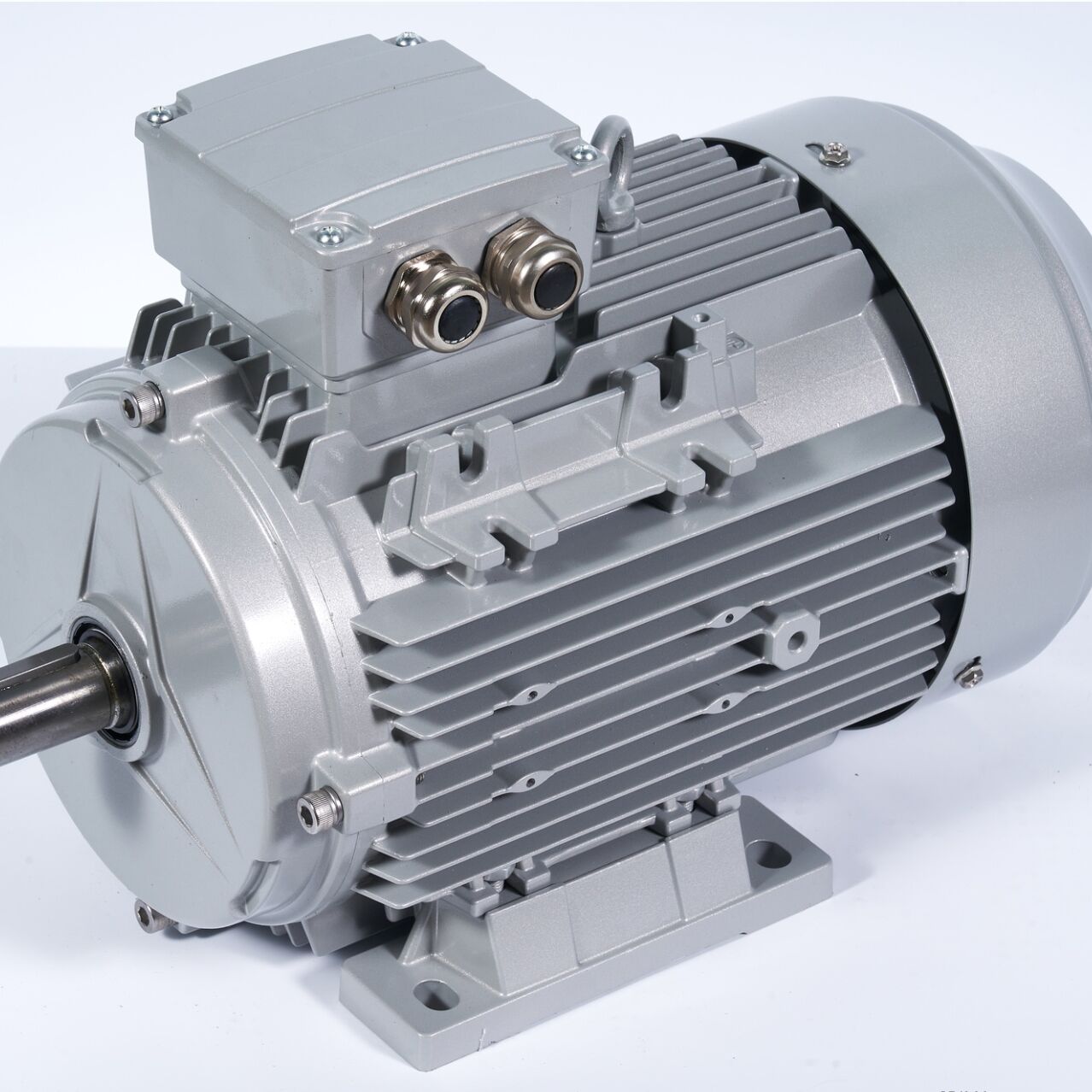
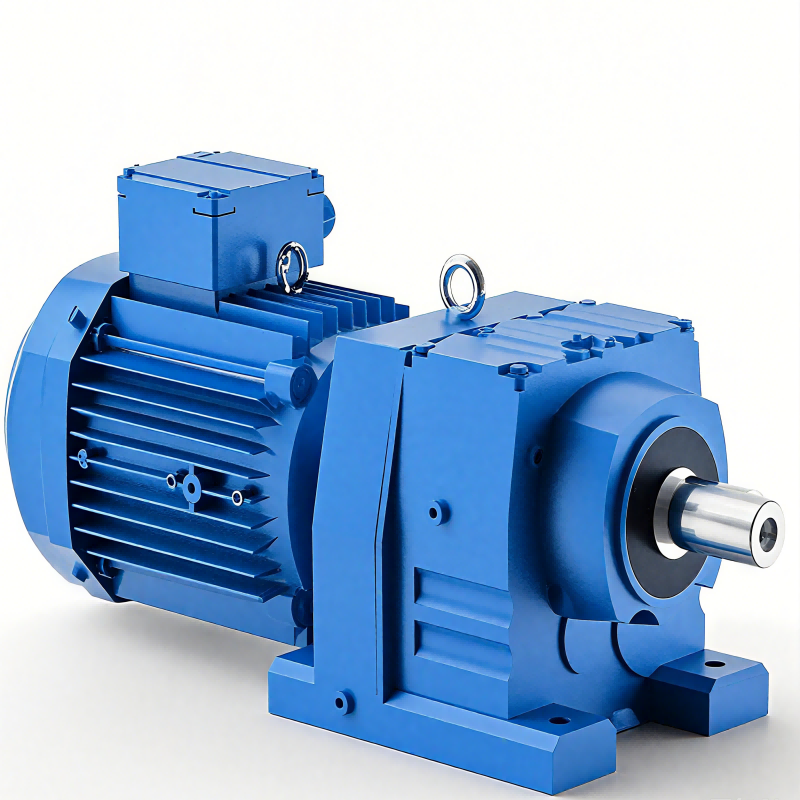
რობოტული სერვომოტორი
Რობოტის სერვომოტორი არის საკმარისი ელექტრომექანიკური მოწყობილობა, რომელიც მომდინარეობს ზუსტი რობოტული მოძრაობებისა და ავტომატიზაციის სისტემების განათლების პირად. ეს მოდერნული მოტორული სისტემა შეიძლება შეიკრივოს ზუსტი პოზიციონირების შესაძლებლობებით და ფიდბექის კონტროლის მექანიზმებით, რაც უზრუნველყოფს ზუსტ კონტროლს სიჩქარეზე, აჩქარებაზე და პოზიციაზე. მოტორი მუშაობს დახურული წიკლის კონტროლის სისტემის მეშვეობით, რომელიც უნდა უწყობს და მოდის პოზიციის მონიტორინგს ენკოდერის ფიდბექის გამოყენებით, რაც უზრუნველყოფს უნიკალურ ზუსტებას მოძრაობის კონტროლში. მოდერნული რობოტის სერვომოტორები ჩამოვალი მახასიათებლებით მართავენ, როგორიცაა შენარჩუნებული ტემპერატურის მონიტორინგი, გამატებული დაცული დაცვა და პოზიციის მეხსიერების ფუნქციები. ეს მოტორები შეძლებენ მუშაობას გაფართოებულ სიჩქარის დიაპაზონში, მას შემდეგ მართლივ ტორქის გამოსავალით, რაც უზრუნველყოფს მათ იდეალურად გამოყენებად მოქმედებებში, სადაც სჭირდება სიძლიერე და ზუსტება. ტექნოლოგია ჩამოვალი კომპონენტებით მუშაობს, როგორიცაა მოტორის ერთეული, ენკოდერი, დრაივერი და კონტროლის ცირკუიტი, ყველა ერთად მუშაობს, რათა მოწოდოს ზუსტი მექანიკური გამოსავალი. რობოტის სერვომოტორები მაღალი გამოყენებას მიიღებენ განსხვავებულ ინდუსტრიებში, მართლაც მართვისა და ასამბლებლების ხაზებიდან მედიკურ მოწყობილობებამდე და ჰაეროსისტემებამდე. ისინი გამოჩნდნენ ამოცანებში, სადაც სჭირდება განმეორებადი მოძრაობები, ზუსტი პოზიციონირება და კონტროლირებული ძალის გამოყენება, რაც უზრუნველყოფს მათ ძირითად კომპონენტებს მოდერნულ რობოტიკაში და ავტომატიზაციაში.