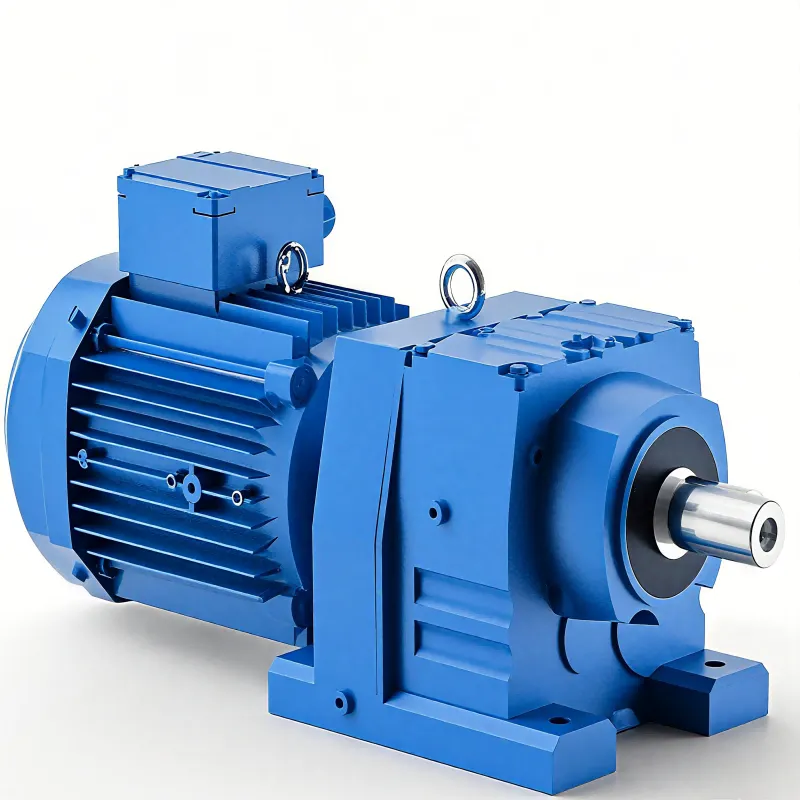
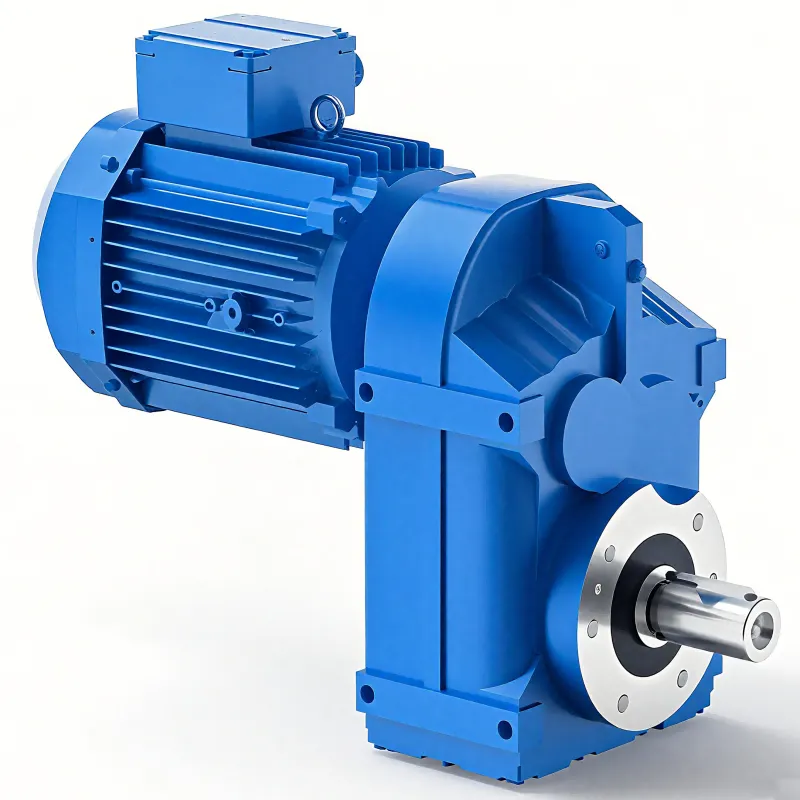
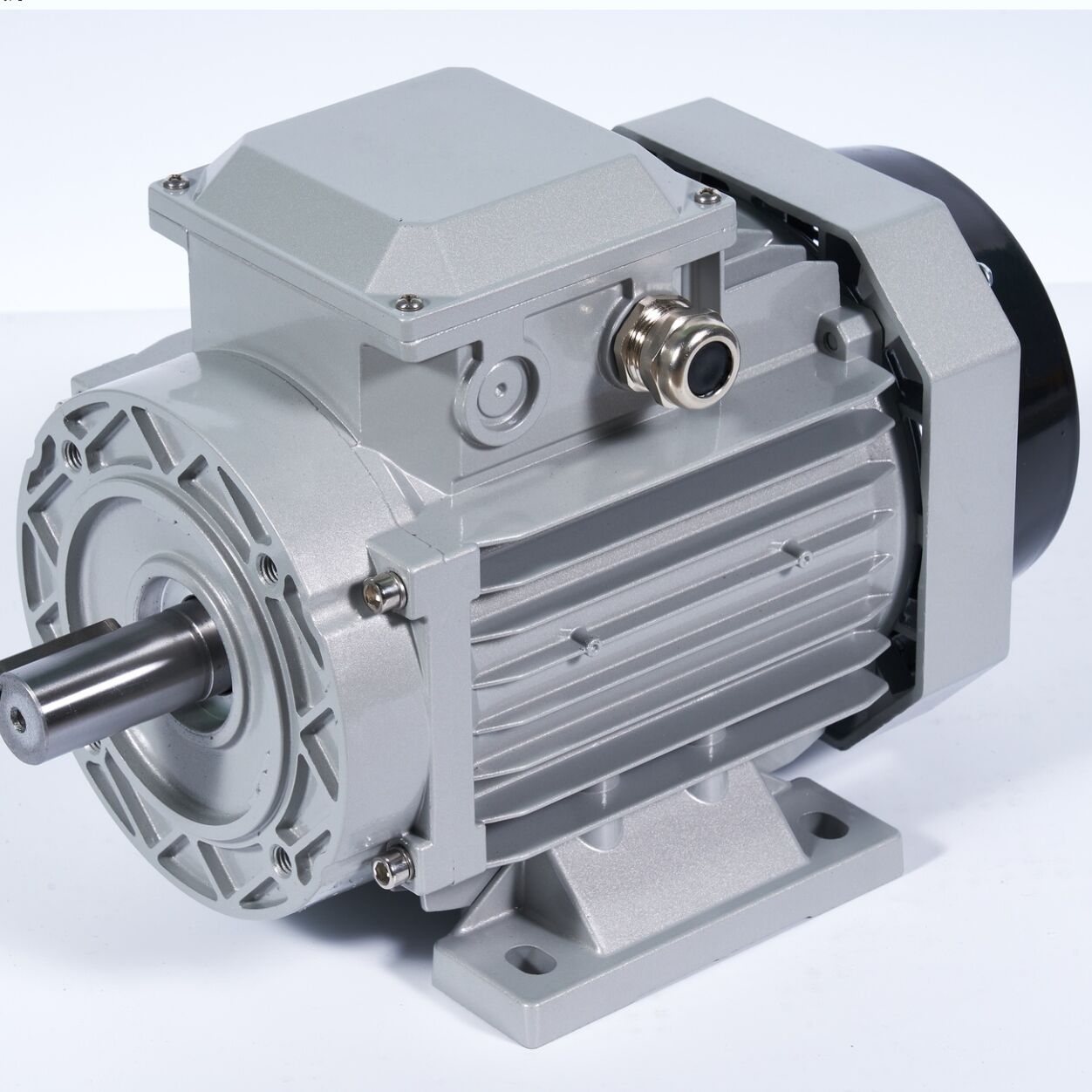
სერვო მოტორის კონტროლური სისტემა
Სერვომოტორის კონტროლური სისტემა წარმოადგენს საფრთხეების კონტროლის საკმარის ამოხსნას, რომელიც იнтეგრირებს ზუსტ პოზიციონირებას დინამიური პასუხის შუალედებთან. ეს მოდერნული სისტემა შედგება მოტორის, ენკოდერის, კონტროლერის და დრაივერისგან, რომლებიც ერთმანეთთან ერთად მუშაობენ, რათა მიიღოს ზუსტი პოზიციის, სიჩქარის და აჩქარების კონტროლი. სისტემა მუშაობს დახურული წინადადების მექანიზმის მეშვეობით, სადაც ენკოდერი უყურებს მოტორის რეალურ პოზიციას და ეს ინფორმაცია უკავშირდება კონტროლერთან. კონტროლერი შემდეგ ამ მონაცემებს შეlaştırებს სასურველ პოზიციას და გაკეთებს სწრაფ გამოსახულებებს, რათა მას ზუსტ კონტროლი დარჩე. მისი შუალედები შედგება ქვე-გრადუსიანი პოზიციის ზუსტობისა და მაღალ სიჩქარის სინქრონული მოძრაობის შუალედებით, რაც ხდის სერვომოტორის კონტროლურ სისტემებს საჭირო მოდერნულ ავტომატიზაციაში. ეს სისტემები გამოჩნდებიან მოქმედებებში, სადაც საჭიროა სწრაფი პოზიციის ცვლილებები, მუდმივი სიჩქარის რეგულირება და ზუსტი ტორქის კონტროლი. ისინი გამოვიყენებიან ინდუსტრიულ რობოტიკაში, CNC მაशინებში, ავტომატურ მწარმოებლის ხაზებზე და ზუსტ აპარატურაში, სადაც საჭიროა ზუსტი პოზიციონირება და გარკვეული მოძრაობის პროფილები. სისტემის შუალედები ვარიაბლური ბრუნავების დასამუშაო შესაძლებლობა ზუსტობის შენარჩუნებით ხდის მას უნიკალურად საჭირო მოდერნულ მწარმოებლობაში, გადასამრავლებლებში და ზუსტი ასამბლებლობაში.