systema controlis motoris servo
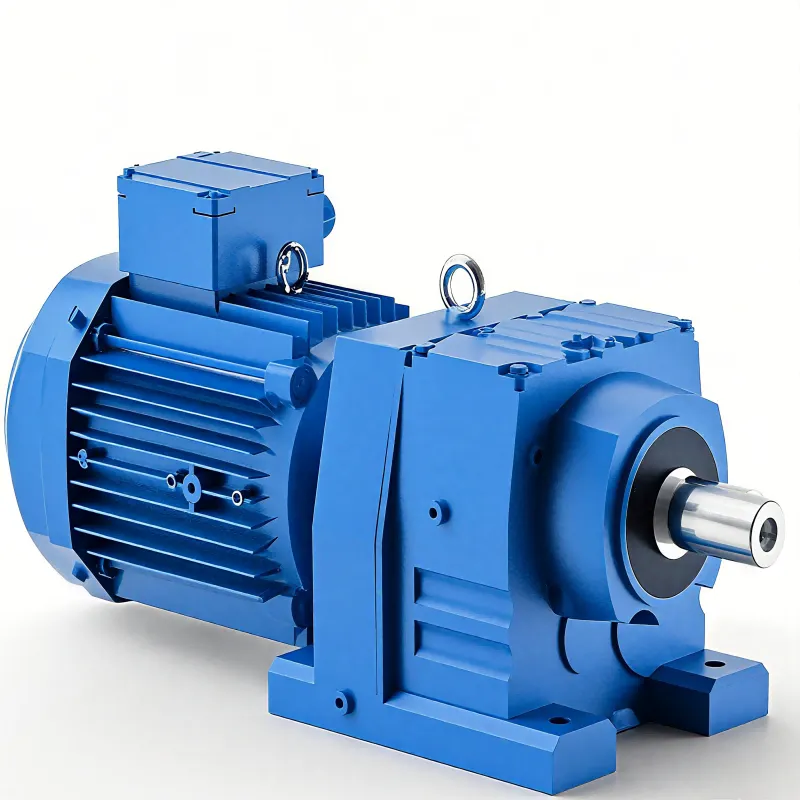
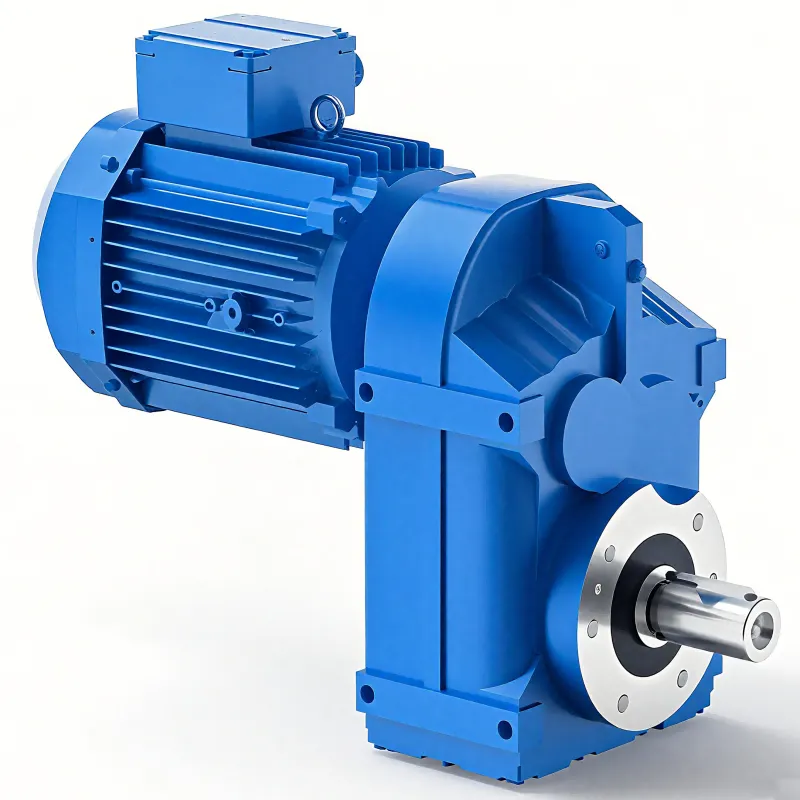
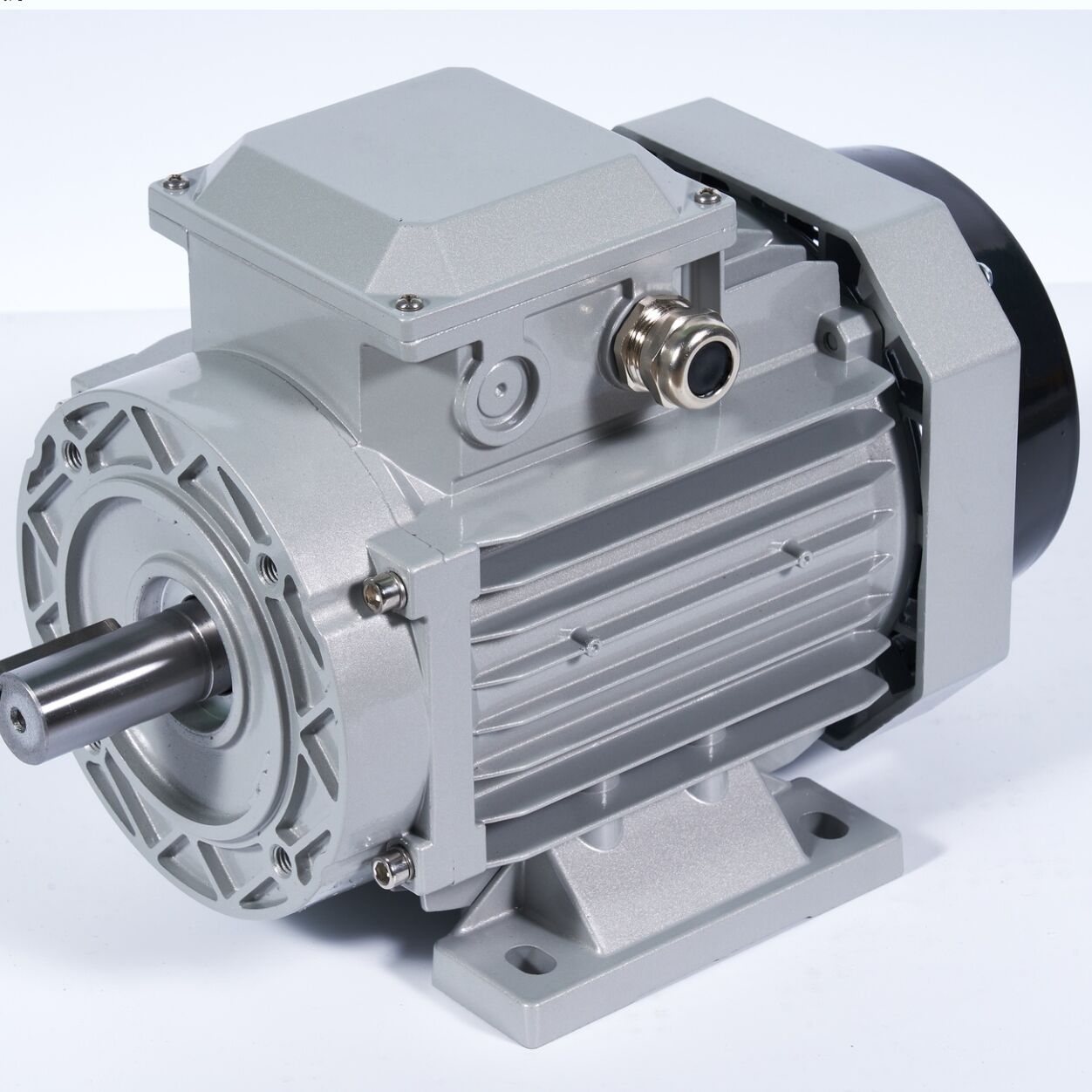
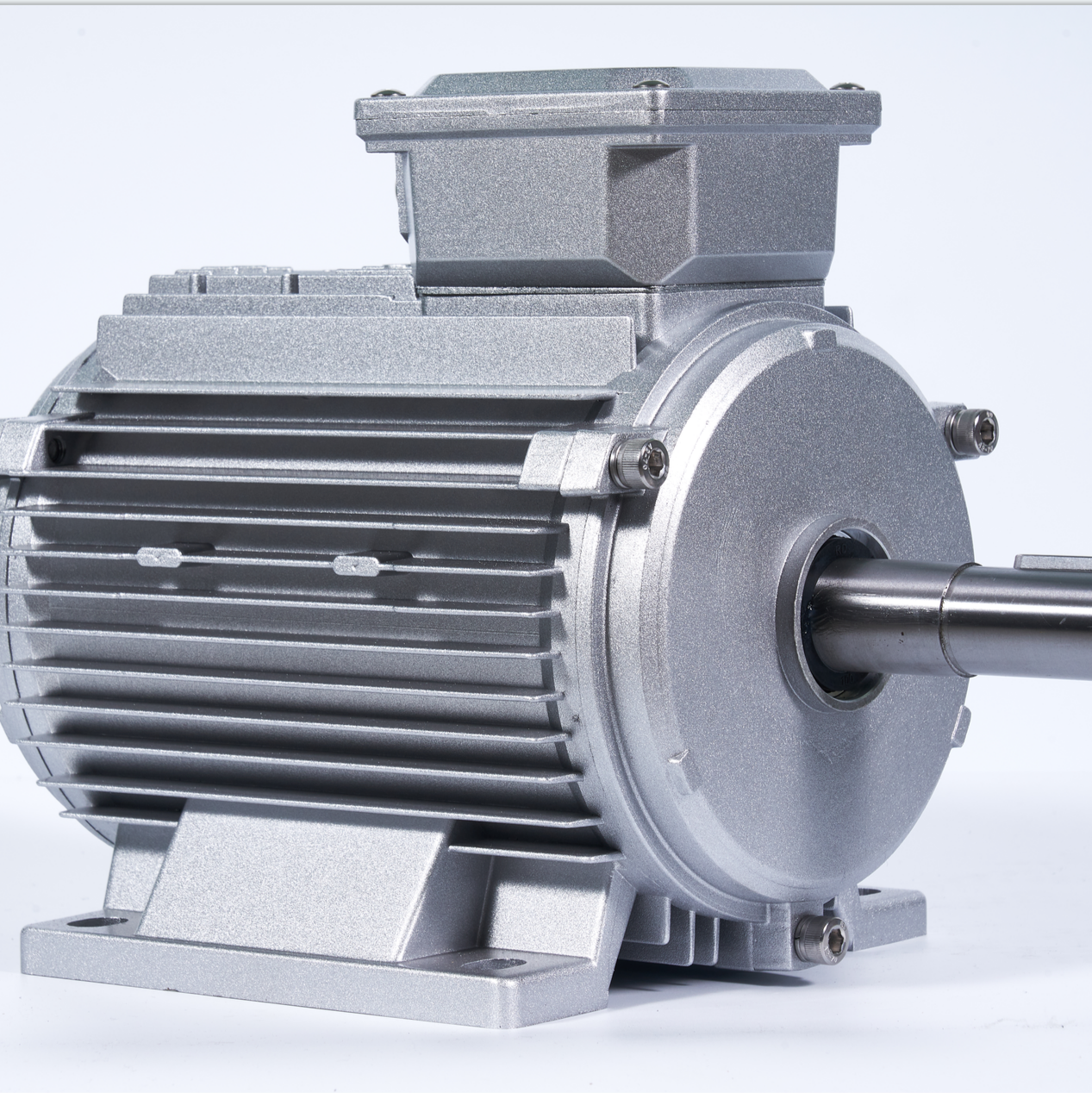
Systema controlis motoris servilis significat solutionem subtilis controlis motus quae integrat positionem praecisam cum potentialibus responsionis dinamicae. Hoc systema avancatum constat ex motore, encoder, controller et driver operantibus in harmonia ad consequendum controlum praecisum positionis, velocitatis et accelerationis. Systema operatur per mechanismum retroactionis circuli clausi ubi encoder continuo monitorat positionem realem motoris et referit hanc informationem retro ad controller. Tunc controller comparat hanc datam cum positione desiderata et facit adjustmentes instantaneos ad conservandum controlum praecisum. Cum potentialibus ab accurate positione infra gradum usque ad motum synchronizatum celerem, systemata controlis motoris servilis sunt essentialia in automatione moderna. Haec systema excellunt in applicationibus requirientibus rapidas mutationes positionis, regulam velocitatis constantem et controlum praecisum torquem. Illa sunt late deploymenta in robotica industriali, machinamentis CNC, lineis manufacturae automate et equipamento praeciso ubi exacta positio et profila motus lenis sunt crucialia. Potentia systematis ad tractandum onera variable dum accuraciam conservat reddit illud indispensabile in processibus manufacturae advance, systemibus packaging et operationibus assemblagei high-precision.