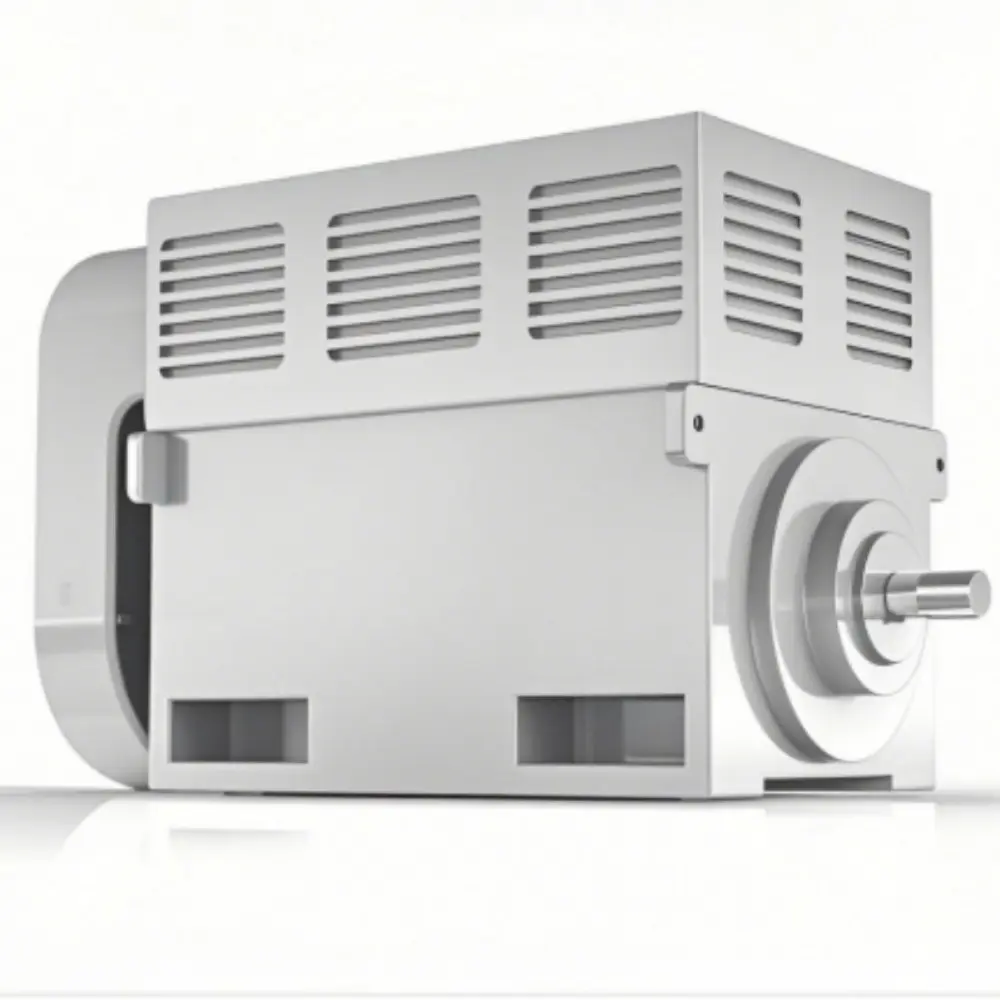
motor servo
Motor servus significat systema praecisionis controlis elaboratum quod combinet motorem electricum cum mechanismis codificandis et controlibus insertis. Hoc systema continens se ipsum praebet controlis praecisam angularem positionem, velocitatem et accelerationem in variis applicationibus. Motor constat ex moto apto coniuncto ad sensorem pro feedback positionis, electronicis controlis elaboratis, et redactore velocitatis pro optimisatione velocitatis et torquoris. Systema servum operatur ex principio circuitus clausi ubi continue monitorat suam positionem contra positionem imperatam, faciendo adjustmentis real-time ad conservandam exactitudinem. Hi motores possunt rotare cum praecisione punctiformi, typically attingentes levels exactitudinis intra 1 gradum, eos facientes pretiosos in applicationibus requiring praecisam positionem. Motores servi moderni includunt features advanced tales ut curvas accelerationis programmabiles, modos positionis multipli, et capabilities communicationis rete. Illi excellunt in applicationibus rotationis continuae et task praecisae positionis, offerendo alta ratio torquoris ad inertiam et rapidas tempora responsionis. Systematis capacitas conservandi positionem sub oneribus variabilibus dum praebet torquorem instantaneum facit eum essentialis in robotica, machina CNC, et processibus manufacturis automatizatis.