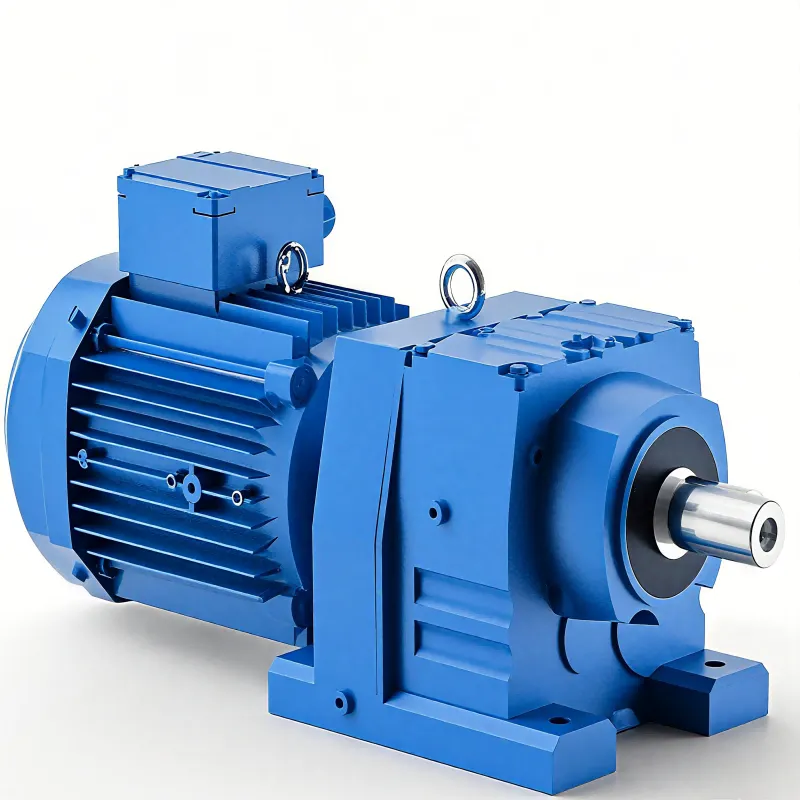
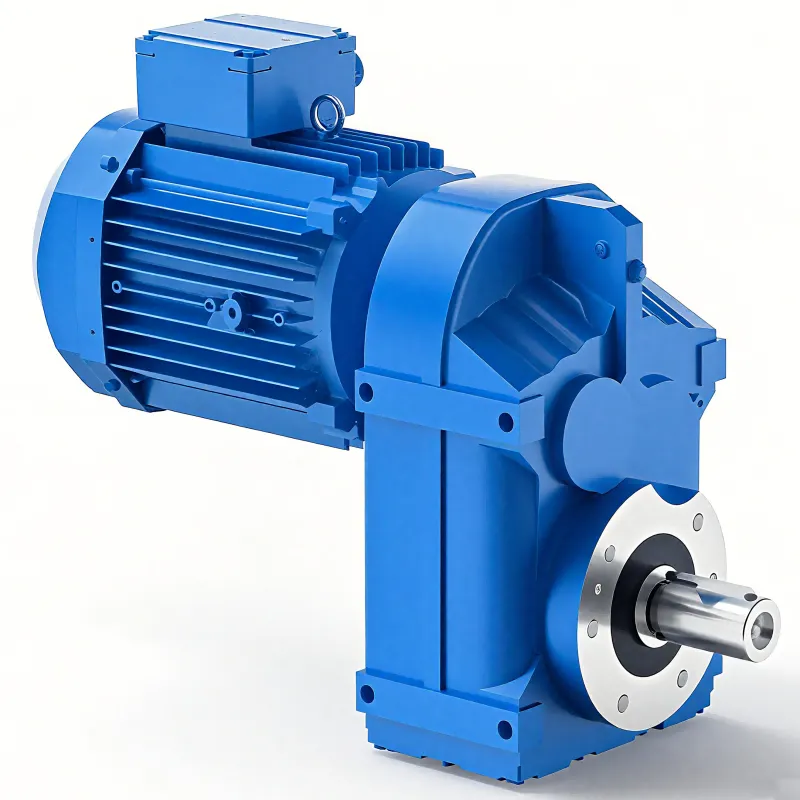
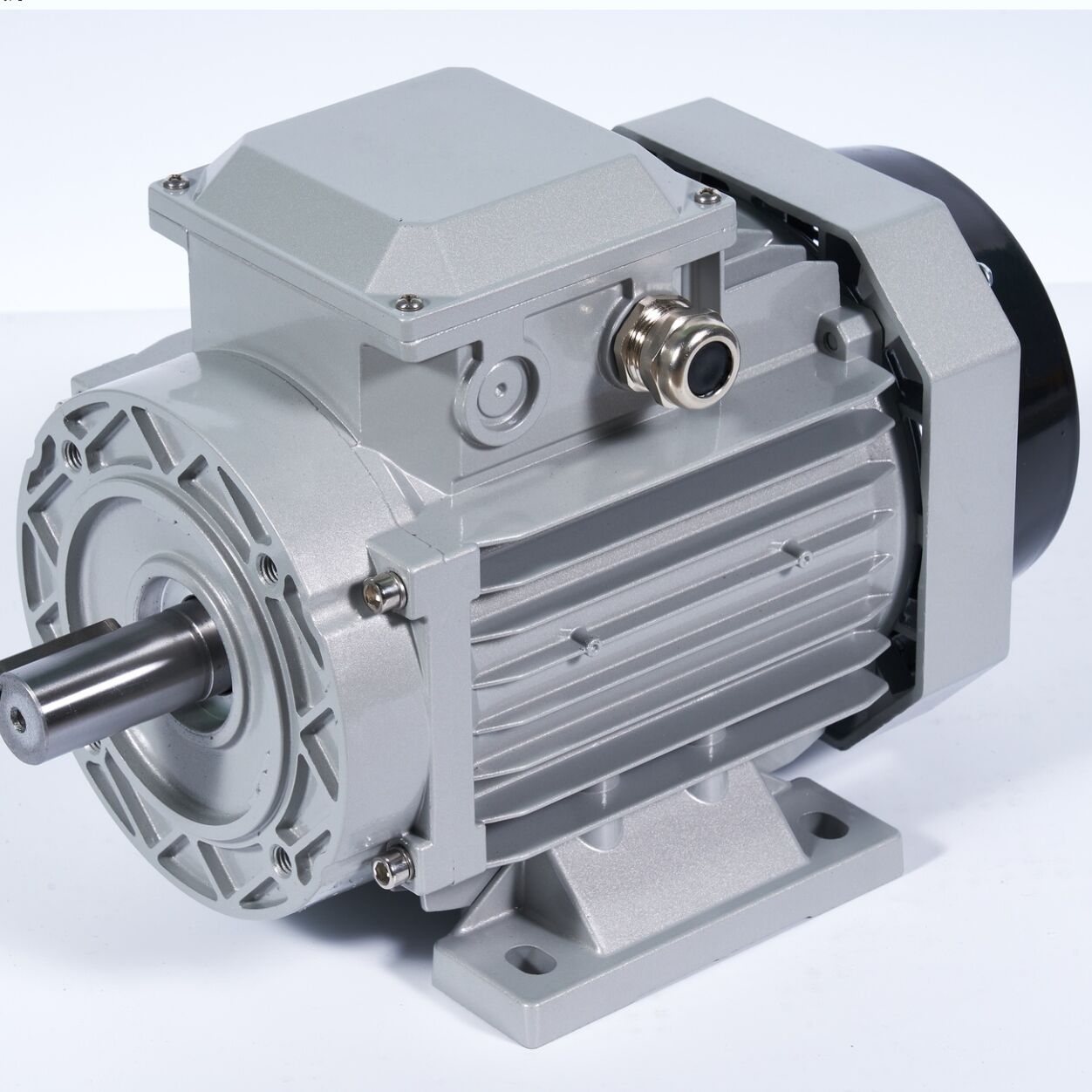
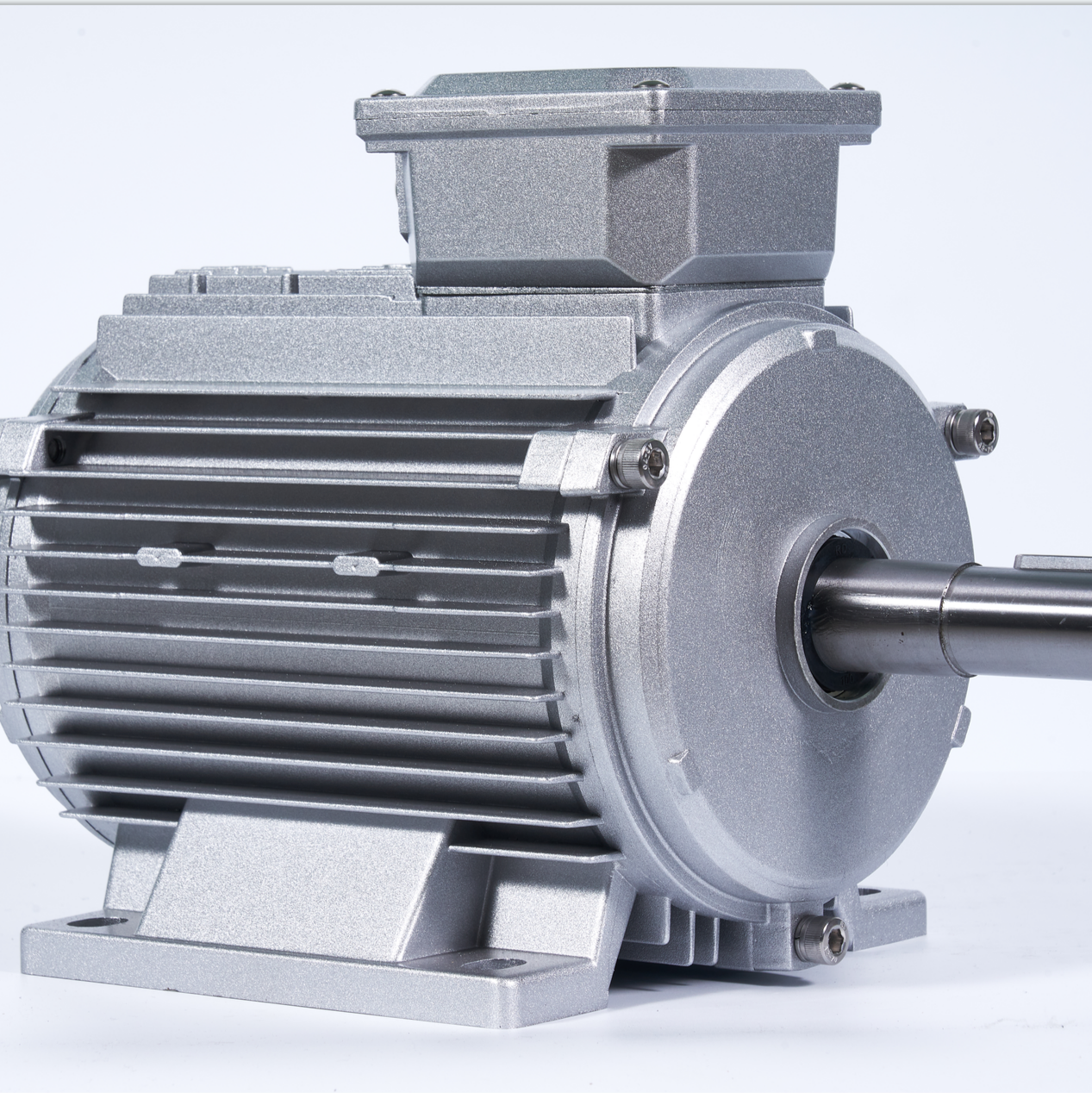
စာရှယ် မိုတာ ကွန်ထရိုလ် စနစ်
Servo motor ကိုင်တွယ်စနစ်သည် ရှုပ်ထွေးမှုအချိန်နှင့် လိုအပ်သောအဆောက်အအုံကို ပေါင်းစပ်ထားသည့် ရှုပ်ထွေးမှုကိုင်တွယ်ဖြေရှင်းမှုတစ်ခုဖြစ်သည်။ ဒီအগုံးလေးစနစ်သည် အင်ဂျင်၊ encoder၊ controller နှင့် driver တို့သည် တူညီသောရည်ရွယ်ချက်၊ အလွန်အမြန်နှင့် acceleration control ကိုရှိရန် အတူတကွလုပ်ဆောင်သည်။ စနစ်သည် encoder က အင်ဂျင်၏ ကိုယ်စားပြုနေသောအချိန်ကို တိုင်းတာပြီး ဒီအချက်ကို controller သို့ ပြန်လည်ပေးဆောင်သည့် closed-loop feedback mechanism တွင်လုပ်ဆောင်သည်။ controller သည် ဒီအချက်ကို လိုအပ်သောအချိန်နှင့် နှိုင်းယှဉ်ပြီး ရှုပ်ထွေးမှုကို ထိန်းသိမ်းရန် အမှားများကို အမြဲတမ်းပြင်ဆင်သည်။ sub-degree positioning accuracy မှ high-speed synchronized motion အထိ ရှုပ်ထွေးမှုကို ပိုင်ဆိုင်သည့် servo motor ကိုင်တွယ်စနစ်များသည် ပြီးခဲ့သော automation တွင် အခြေခံအရာများဖြစ်သည်။ ဒီစနစ်များသည် လျင်မြန်သောအချိန်ပြောင်းလဲမှုများ၊ ကိုက်ညီသောအလွန်အမြန်ကိုင်တွယ်မှုနှင့် ရှုပ်ထွေးမှုကိုတိုက်ရိုက်ထိန်းသိမ်းရန်လိုအပ်သော အသုံးပြုမှုများတွင် ကောင်းမွန်သည်။ ဒီစနစ်များသည် industrial robotics၊ CNC machinery၊ automated manufacturing lines နှင့် precision equipment တို့တွင် ပိုင်ဆိုင်သည်။ ဒီစနစ်သည် တိုက်ရိုက်တည်းဖြတ်မှုကို ထိန်းသိမ်းနိုင်ရန် variable loads များကို လုပ်ဆောင်နိုင်သည်ဟု အရေးကြီးသော advanced manufacturing processes၊ packaging systems နှင့် high-precision assembly operations တွင် မိမိကိုယ်တိုင်အသုံးပြုနိုင်သည်။