ဆာဗို
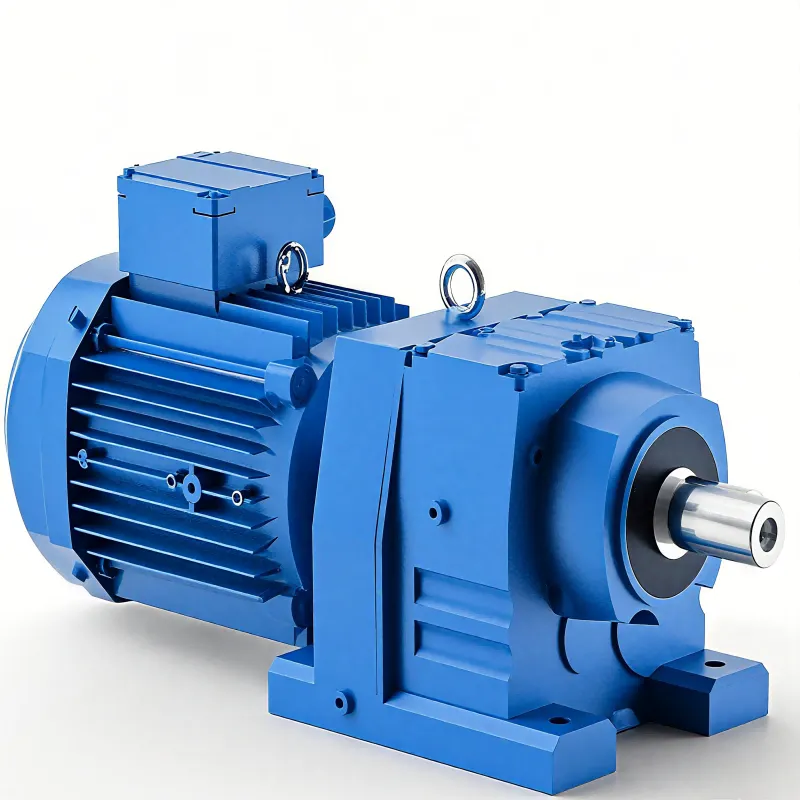
SERVO သည် မျိုးစုံသောအလုပ်ဆောင်ရွက်မှုများတွင် တိကျသော နေရာချထားမှုနှင့် လှုပ်ရှားမှုကို ထုတ်လုပ်ပေးသည့် ရှုပ်ထွေးသော ကိုင်တီးစနစ်ဖြစ်ပါသည်။ ဒါဟာ မော်တာ၊ ပြန်လည်လှုပ်ရှားမှုစနစ်နှင့် ကိုင်တီးလမ်းကြောင်းများဖြင့် တူညီသော လှုပ်ရှားမှုနှင့် နေရာချထားမှုကို ရရှိရန် အသုံးပြုသည်။ ယင်းစနစ်သည် ပြီးပြည့်သောနေရာချထားမှုကို လျှော့ချသော အချိန်တွင် နှိုင်းယှဉ်ပြီး တက်ကြွမှုကို တက်ရှိုက်လှုပ်ရှားပေးသည့် ပြန်လည်လှုပ်ရှားစနစ်ပေါ်တွင် အလုပ်လုပ်ပါသည်။ စုံစမ်းသော SERVO များတွင် ဒီဂျစ်တယ်လုံးဆိုင်ရာလုပ်ဆောင်ချက်များ၊ များသော ကိုင်တီးအဆင့်အတန်းများနှင့် သိုလှောင်ခွင့်အားဖြင့် ပါဝင်ပါသည်။ ဒီမျိုးစုံသော လုပ်ဆောင်ချက်များသည် ကျော်ကြားသော လှုပ်ရှားမှုကို လိုအပ်သော အသုံးများတွင် ကောင်းမွန်စွာ အလုပ်လုပ်ပါသည်။ ပြန်လည်လှုပ်ရှားမှုစနစ်သည် encoders သို့မဟုတ် resolvers ကို အသုံးပြု၍ နေရာချထားမှု၊ အလျင်နှင့် ဘယ်မှာမှ torque ကို တွေ့ရှိပြီး ပြောင်းလဲသောအခြေအနေများကို အကြောင်းအရာအားဖြင့် ဖြစ်ပေါ်စေပါသည်။ သူတို့သည် နေရာချထားမှု၊ အလျင်နှင့် torque control အဆင့်များတွင်လည်း လုပ်ဆောင်နိုင်ပြီး မျိုးစုံသောအသုံးများတွင် အသုံးပြုနိုင်သည်။ ကိုင်တီးစနစ်သည် settling time၊ overshoot နှင့် steady-state error တို့ကဲ့သို့သော အလုပ်ဆောင်ရွက်မှုပараметာများကို အကောင်အထည်ဖော်ရန် ရှုပ်ထွေးသော algorithm များကို အသုံးပြုပါသည်။ နည်းပညာရဲ့ ရှင်းလင်းမှုများဖြင့် ယခုအခါ SERVO များသည် ပိုမိုသော သိမ်းဆည်းရှိမှု၊ ပိုမိုသော အင်အားကို ကျော်ကြောင်းစွာ အသုံးပြုခြင်းနှင့် စုံစမ်းသော အလုပ်လုပ်ပေးမှုအားဖြင့် ပိုမိုသော အလုပ်လုပ်ပေးမှုများနှင့် ပေါင်းစပ်မှုအားဖြင့် ပိုမိုသော အလုပ်လုပ်ပေးမှုများကို ပေါင်းစပ်ပေးပါသည်။