בשווה עם מנועי DC מסורתיים עם שערות (BDC), מנועי BLDC מסירים קומוטטורים ושערות מכניים, ומוצעים יתרונות כמו יעילות גבוהה יותר, תקופת חיים ארוכה יותר, רעש נמוך יותר ותחזוקה פחותה. לכן, הם בשימוש רב ברכבים חשמליים, דרונים,
בית כלי חשמליים, אוטומציה תעשייתית, ציוד רפואי ושדות אחרים.
5. מנוע DC עם שיניים (BDC)
BDC הוא מנוע DC שמגיע למחלף דרך מחלף מכני (שיניים ומחלף). הוא תלוי בהשקעה בין השיניים הקARBוניות והמחלף כדי לשנות את כיוון הזרם באופן מתמשך, המניע את המגמה להסתובב.
למרות שה-BDCs מוחלפים בהדרגה על ידי BLDCs במספר יישומים, הם עדיין בשימוש נרחב בכלי עבודה רבים ובהתקנים של הצרכן בגלל העלות הנמוכה שלהם, הבקרה הפשוטה והトルק התחלתי הגבוה.
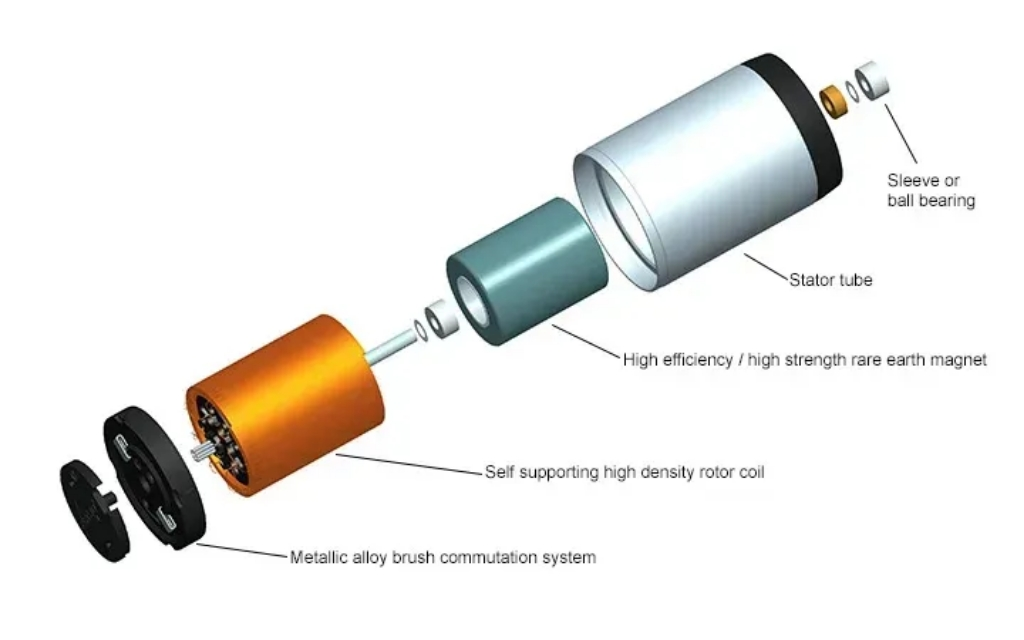
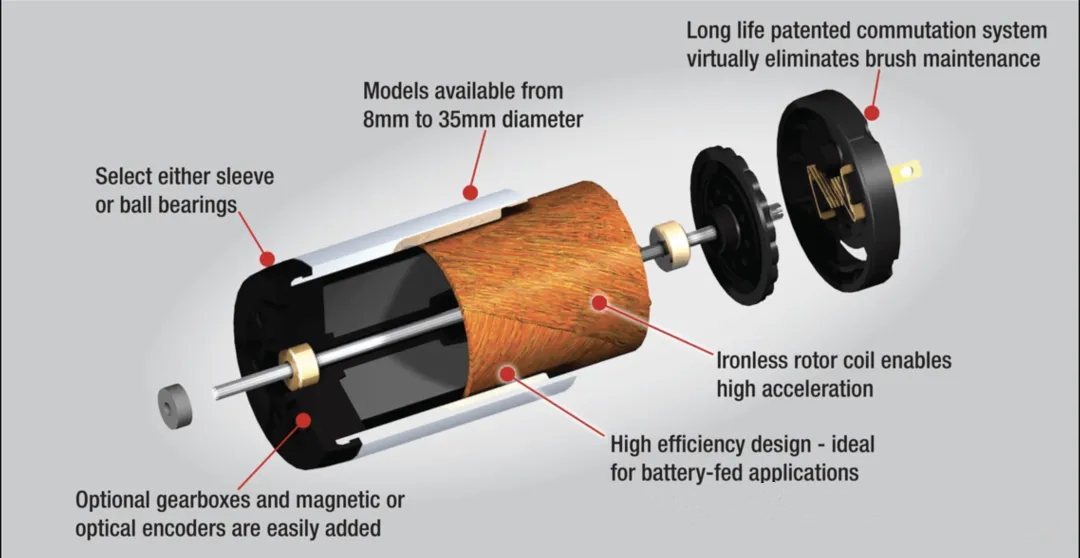
טכנולוגיה הטכנולוגיה של מנוע DC מברשת בדיאגרמה נגזרת מעיצוב המבוסס על רוטור ללא ברזל (לולאות עצמאיות), שמחובר למערכת קומוטציה של מתכת אצילה או פחמן-נחושת ומגנטים של ארצות נדירות או אלניקו.
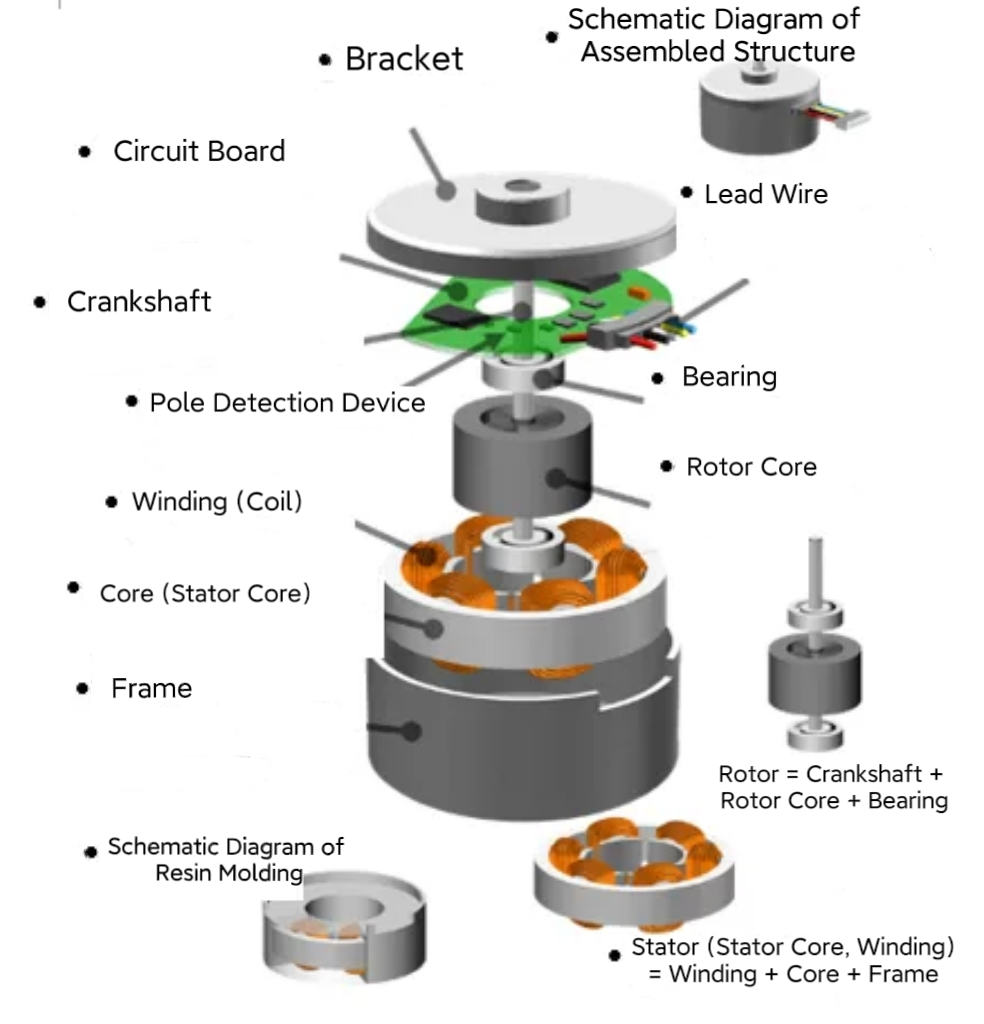
כל מנועי DC מורכבים משלושה תת-רכיבים עיקריים:
2. כיסוי סוף מחזיק מברשות
3. רוטור
6. מנוע מאובן בזיהום נוזלי
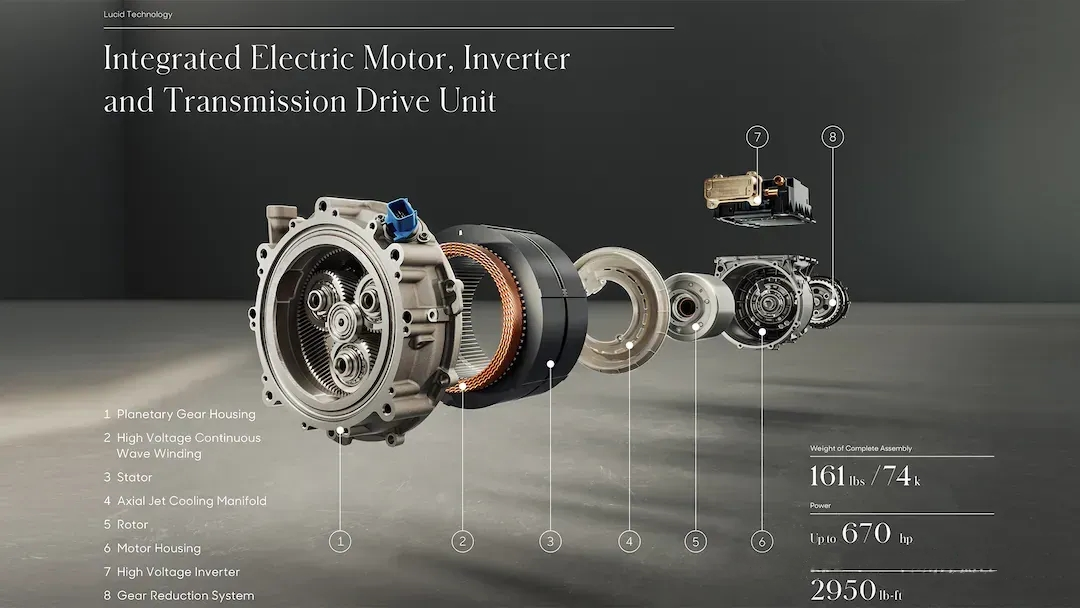
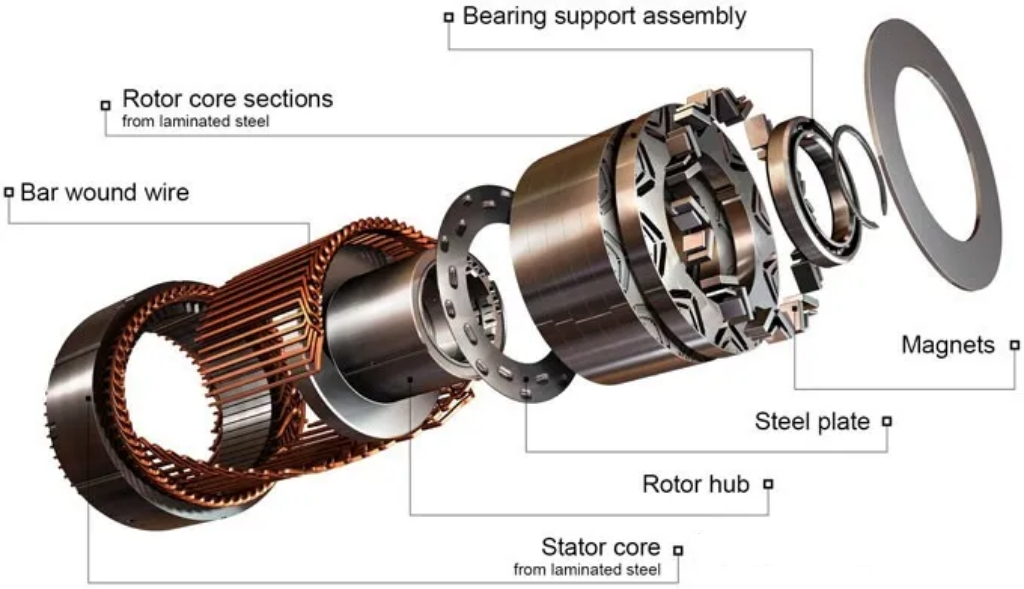
מנוע מאובן בזיהום נוזלי הוא סוג של מנוע שמשתמש במערכת זיהום נוזלית כדי לשלוט בטמפרטורתו. בהשוואה למנועים מסורתיים המאובנים באוויר, מנועים מאובנים בנוזל מציגים יעילות גבוהה יותר בהפרשת חום ויכולים להישאר בעבודה יציבה תחת תנאים של כוח גבוה ועומס גבוה.
מערכות זיהום נוזלי משתמשות בדרך כלל בזיהום מים (כולל פתרונות של גליצרול אתיילני), זיהום שמן או זיהומים אחרים, עם שיטות זיהום כמו מעיליי זיהום, ערוצי זיהום מבוקרים ובזיהום ישיר של רוטורים או סטטורים.
הנדסים בחברה Lucid Motors מאמינים שיש "אזורים מתים" מגנטיים צרים בין הסpiralings, שבהם ניתן ליצור ערוצי זיהום דקים ללא השפעה על הזרימתיות המגנטית. הערוצים האלה מאפשרים לשמן הזיהום להוציא יותר חום ממקומות קרובים יותר למקור החום (בתוך הנחושת). השמן זורם מחוץ לערוצים הצרים דרך חורים קטנים, שמפזרים את השמן על הסpiralings הנחושת חשופים.
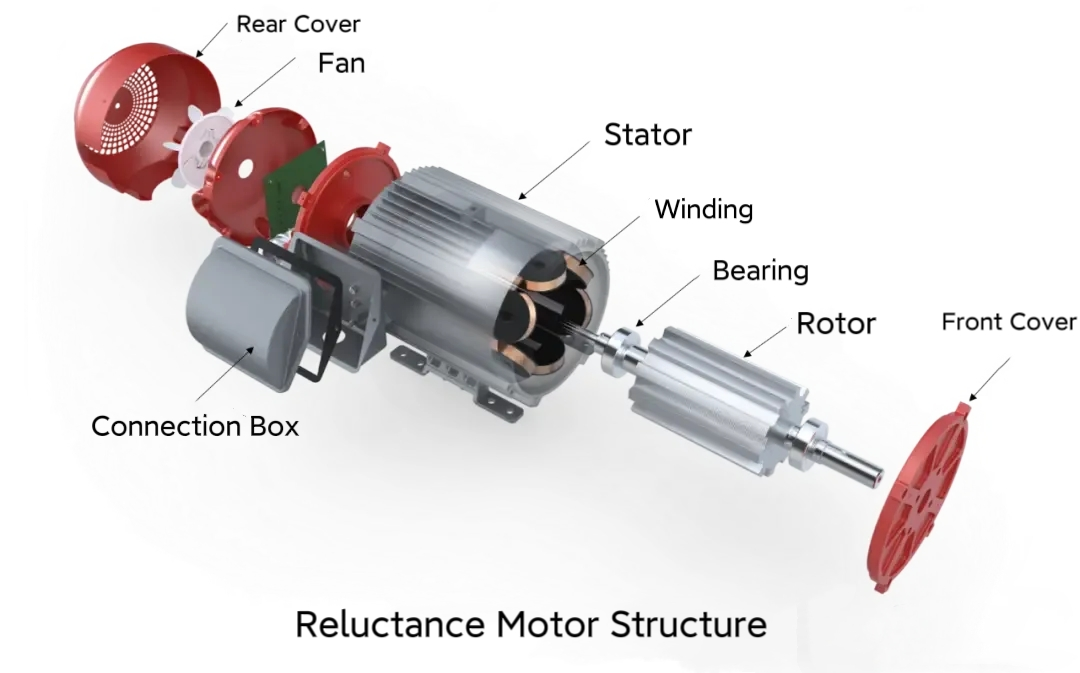
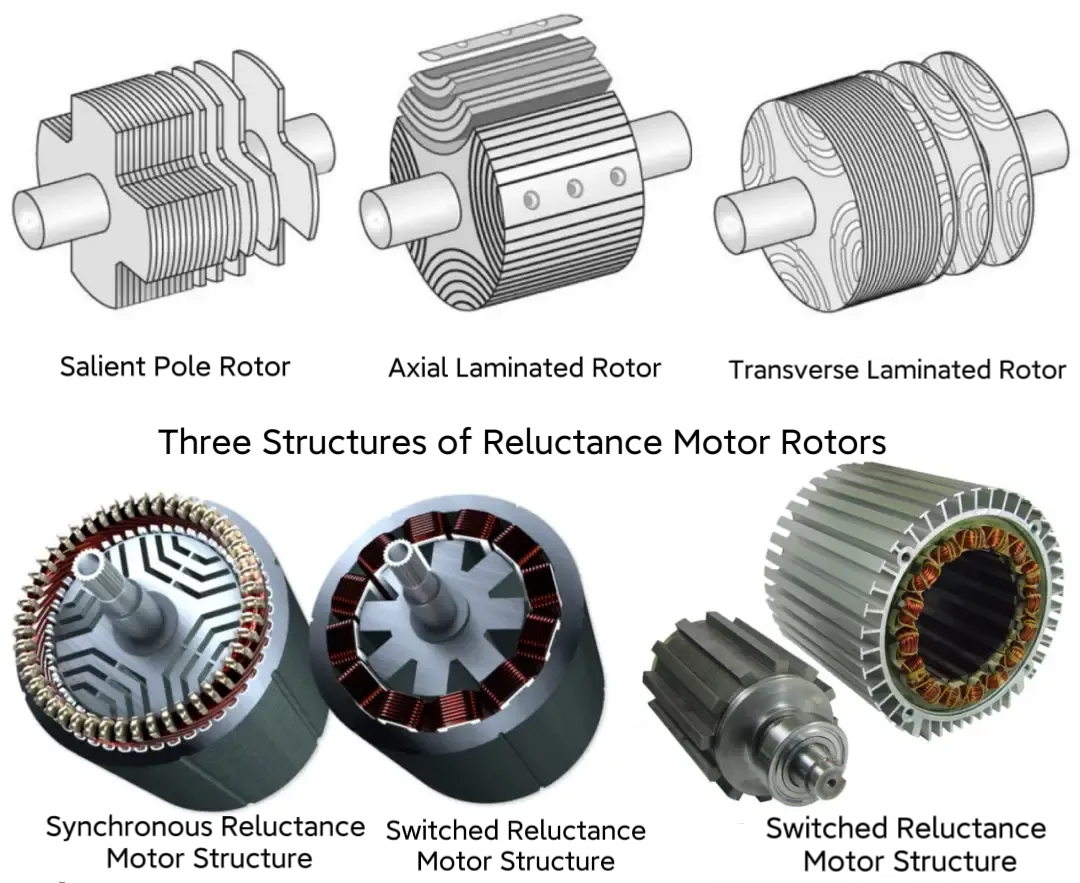
7. מנוע רלוקטנס
מנוע רלוקטנס יוצר תורן בהתבסס על תכונות של רלוקטנס מגנטי. יש לו מבנה פשוט, אינו דורש מגנטים קבועים וمناسب לסביבות טמפרטורה גבוהה. הוא יעיל, אמין והון-נמוך, מה שגורם לו להיות מתאים לתפקידיים המצריכים צפיפות תורן גבוהה ואפקטיביות אנרגטית.
מנועי רלוקטנס מחולקים בדרך כלל לשני סוגים: מנועי רלוקטנס סינכרוניים (SynRM) ומנועי רלוקטנס מתחלפים (SRM).
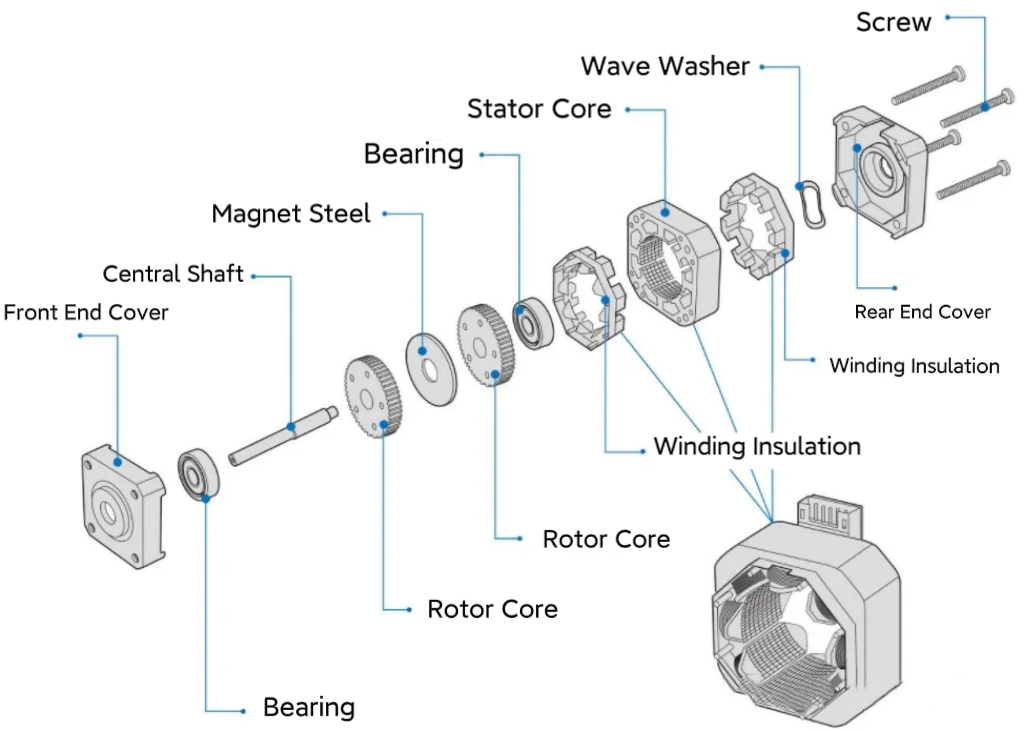
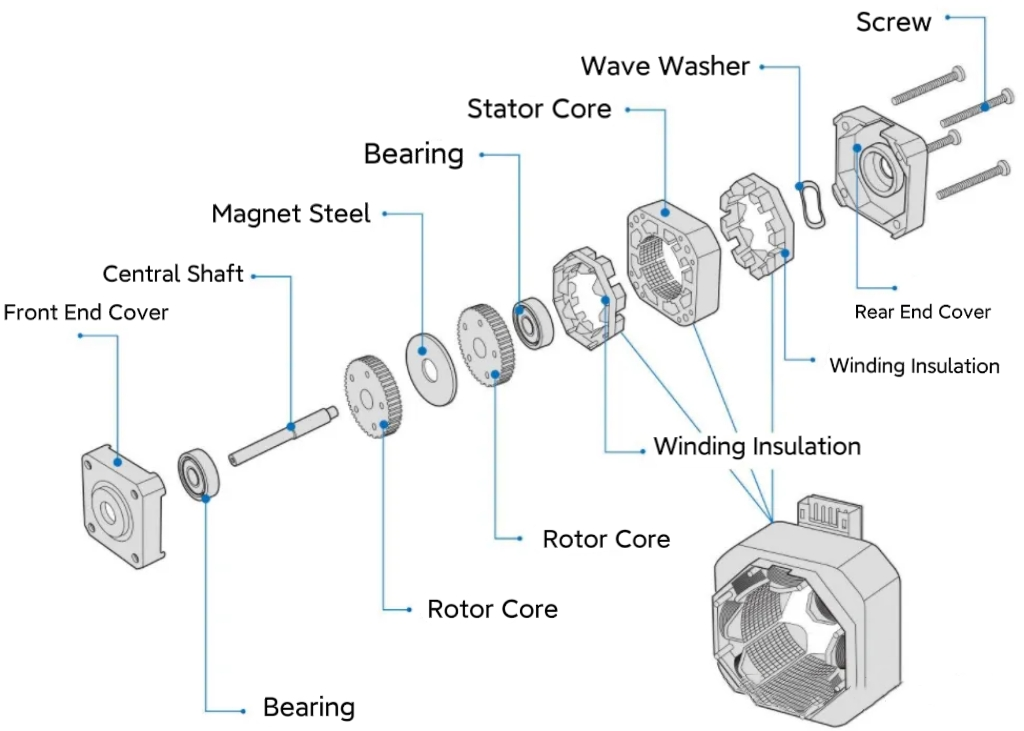
8. מנוע צעד
מנוע צעד הוא מנוע שליטה בדיסקרטי שבו המגמה מסתובבת זווית קבועה (זווית צעד) עם כל פולס חשמלי שייך, מה שמאפשר שליטה מדויקת במיקום. תכונות עיקריות :
תנוחה מדויקת ללא מערכת משוב.
• トルQUE גדול ופעולה יציבה במהירות נמוכה
مناسب לשימושים המצריכים בקרת דיוק.
משתמשים בצורה רחבה באוטומטיזציה תעשיתית ובאלקטרוניקה לצרכן. סוגי מנועי צעד נפוצים כוללים מנועי צעד עם מגנט קבוע (PM), מנועי צעד עם התנגדות משתנה (VR) ומנועי צעד היברידיים (HB).
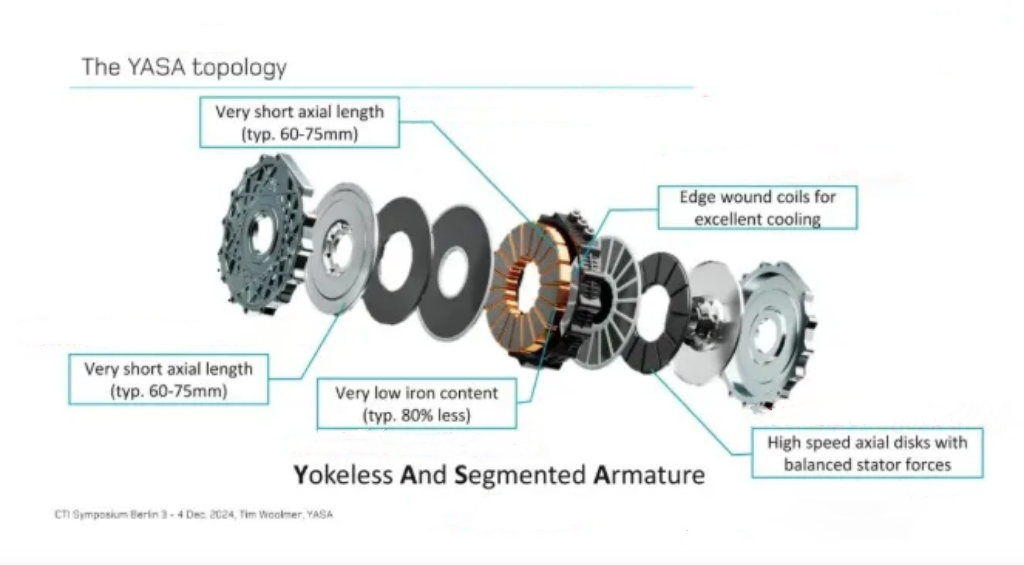
9. מנוע פלוקס אקסיאלי
מנוע פלוקס אקסיאלי הוא טופולוגיה מיוחדת של מנוע שבה כיוון הפלוקס המגנטי מקביל לציר המנוע, בניגוד למנועי פלוקס רדיאליים מסורתיים (שבהם הפלוקס מאונך לציר).
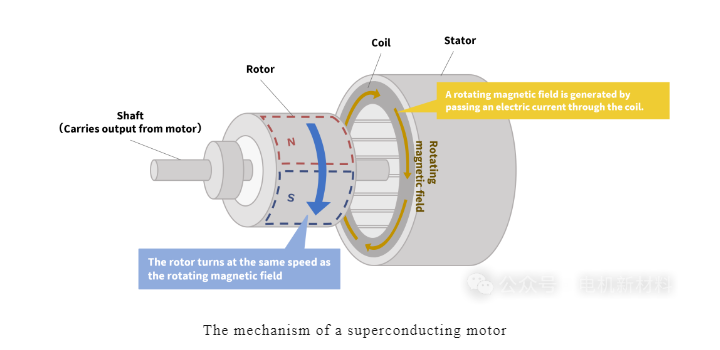
10. מנוע על-מוליך
מנוע על-מוליך הוא סוג של מנוע שמשתמש בחומרים על-מוליכיים כתאומים או כרכיבים של גלגל המהירות. בהשוואה למנועים מסורתיים, יש לו צפיפות כוח גבוהה יותר, יעילות גדולה יותר והפסדים נמוכים יותר.
חומרים חומרים על-יוצרי זרם מראים התנגדות חשמלית אפסית ומגנטיזם שלם (השפעת מייסנר) בטמפרטורות נמוכות, מה שמאפשר למנועים להפחית באופן משמעותי אובדני נחושת ואובדני ברזל תוך שיפור ביעילות המרה של אנרגיה.
מנועים על-יוצרי זרם יכולים להשיג בו זמנית משקל קל, גודל קומפקטי ועוצמה גבוהה.









 חדשות חמות
חדשות חמות