Ტრადიციულ მოხრების მქონე DC მოტორების (BDC) შედარენ, BLDC მოტორები გაუმჯობეს მექანიკურ კომუტატორებს და მოხრებს, წვდომა იძლევა საშუალებებს, როგორიცაა უმეტესი ეფექტიურობა, გრძელი სერვისის პერიოდი, დაბალი ჰმის დონე და ნაკლები მართვა. შედეგად, ისინი გამოიყენება ელექტრო ავტომობილებში, დრონებში,
მთავარი ბიზარებში, ინდუსტრიულ ავტომაციაში, მედიცინურ აღჭურვილებში და სხვა სფეროებში.
5. შეხვეული DC მოტორი (BDC)
BDC არის DC მოტორი, რომელიც კომუტაციას აღწერს მექანიკური კომუტატორის (შეხვეულები და კომუტატორი) საშუალებით. ის დამოკიდებულია კარბონის შეხვეულებისა და კომუტატორის კონტაქტზე, რათა უწყვეტლად შეცვალოს მიმდინარე მიმართულება და გადააქცეს როტორის როტაცია.
Მიუხედავად იმისა, რომ BDC-ები ზოგიერთ აპლიკაციაში ანალოგიურად ჩანაცვლებულია BLDC-ებით, ისინი ჯერ ასევე გამოიყენება ბევრ ინდუსტრიულ და კონსუმერულ მოწყობებში, რადგან მათ აქვს დაბალი ღირებულება, მარტივი კონტროლი და მაღალი საწყისი ტორქი.
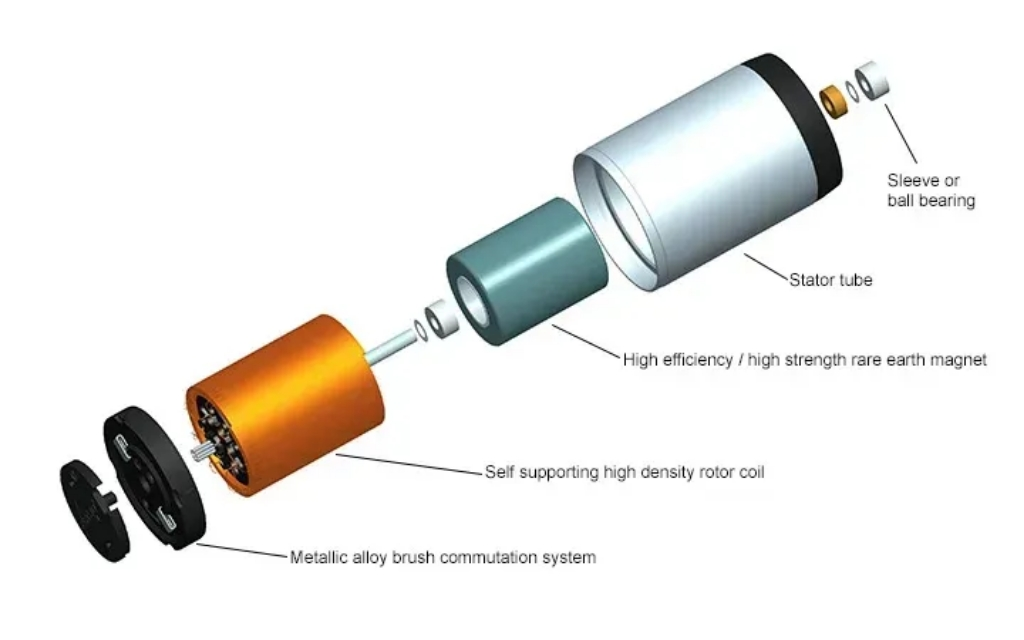
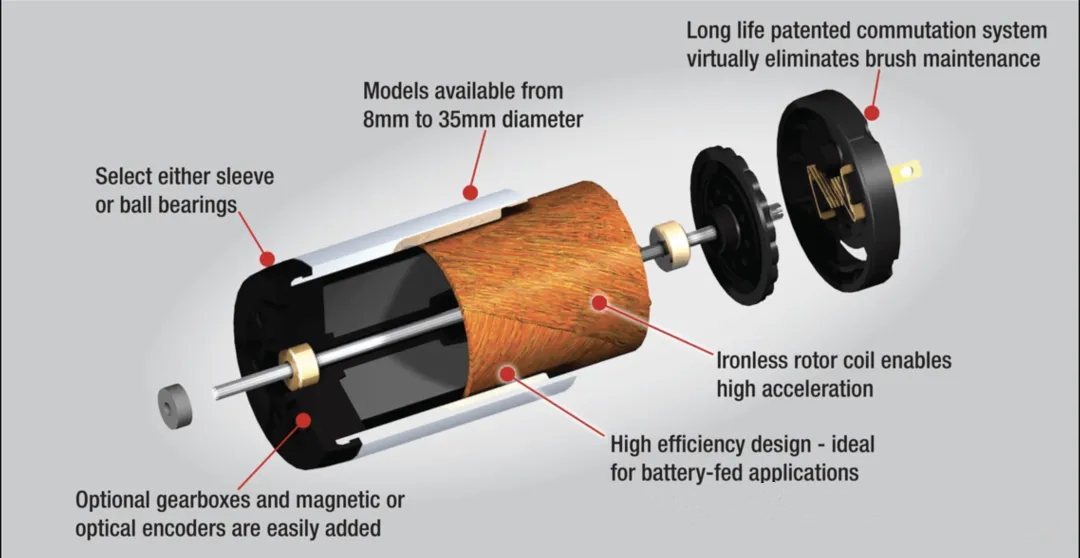
Დიაგრამაზე ჩანს შუქილი DC მოტორის ტექნოლოგია, რომელიც გამოწვეულია დიზაინიდან, რომელიც დაყრდნობულია ირონის გარეშე როტორზე (თვითმხარე სპირალები), შე祺ებული ნობილური მეტალის ან სამაგნიტის-სისტემის კომუტაციის სისტემასა და 희მაღლების ან alnico მაგნიტებზე.
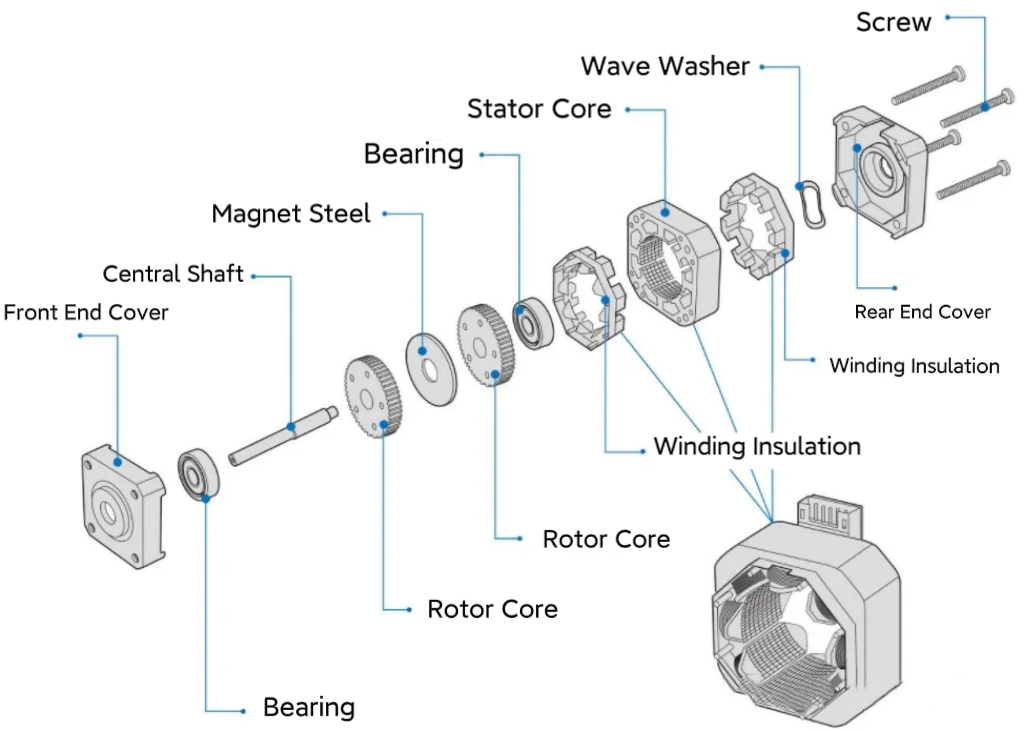
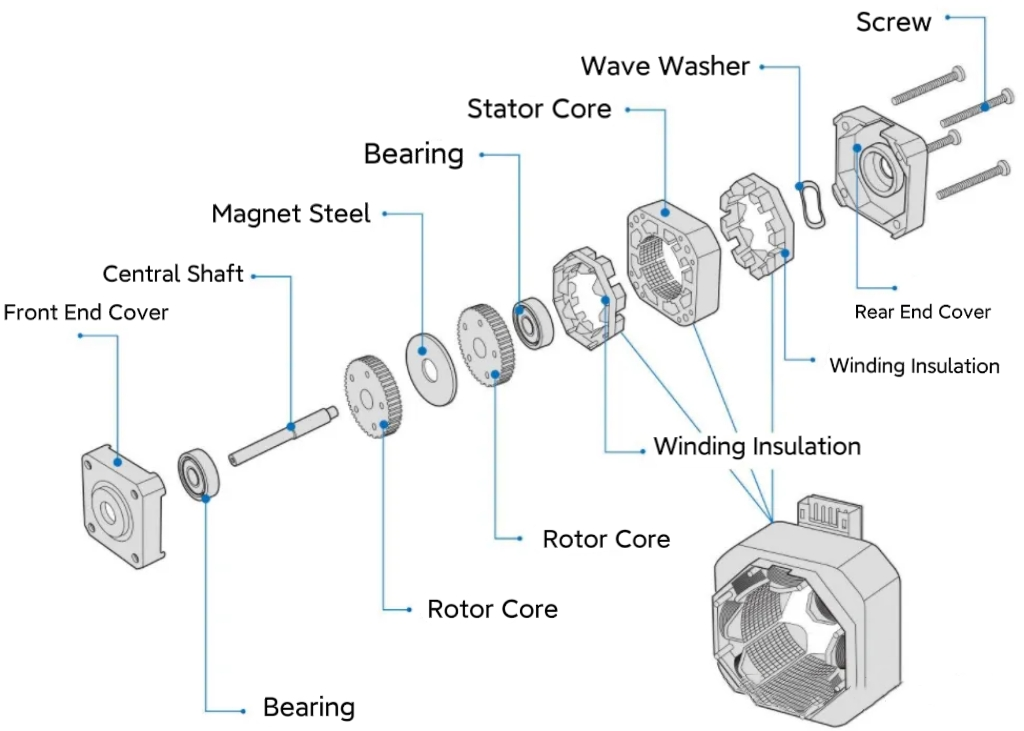
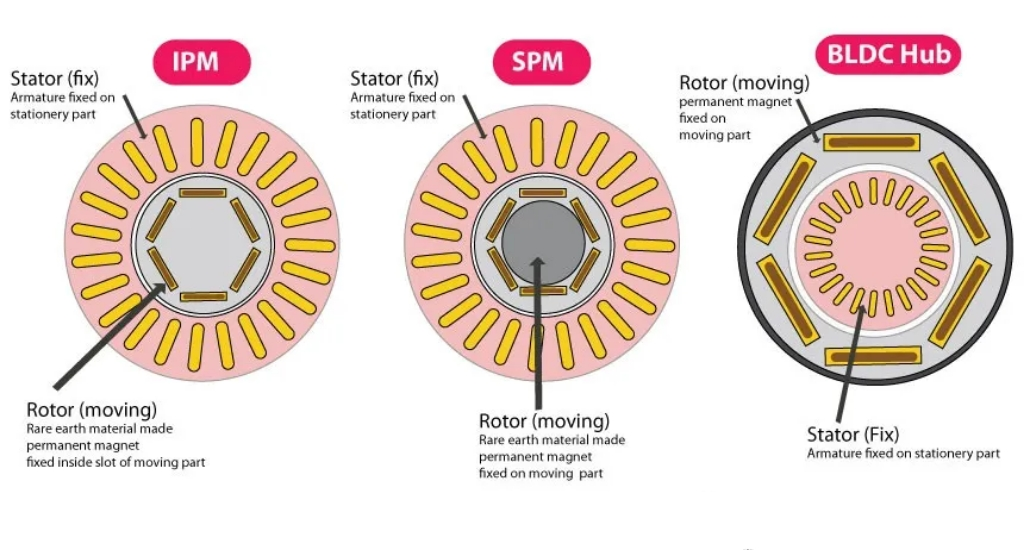
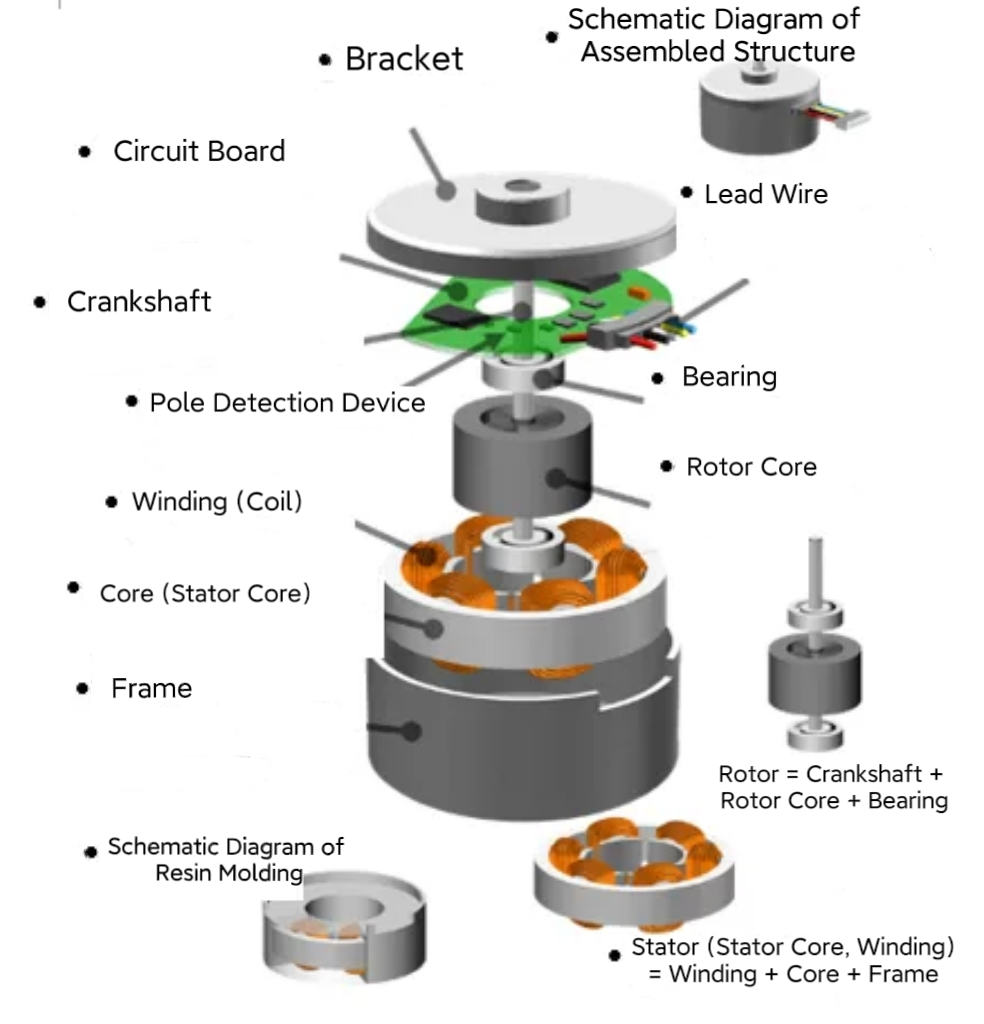
Ყველა DC მოტორი სამ ძირითად ქვე-კომპონენტად შედგება:
2. საფრენის მახარის დაფარვა
3. როტორი
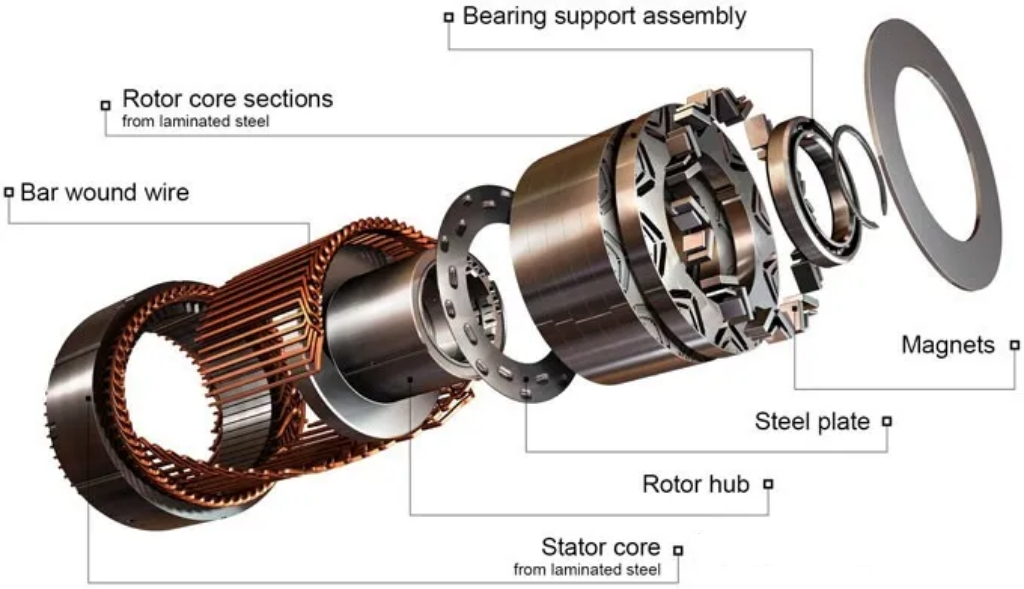
6. თევზე გამყოფი მოტორი
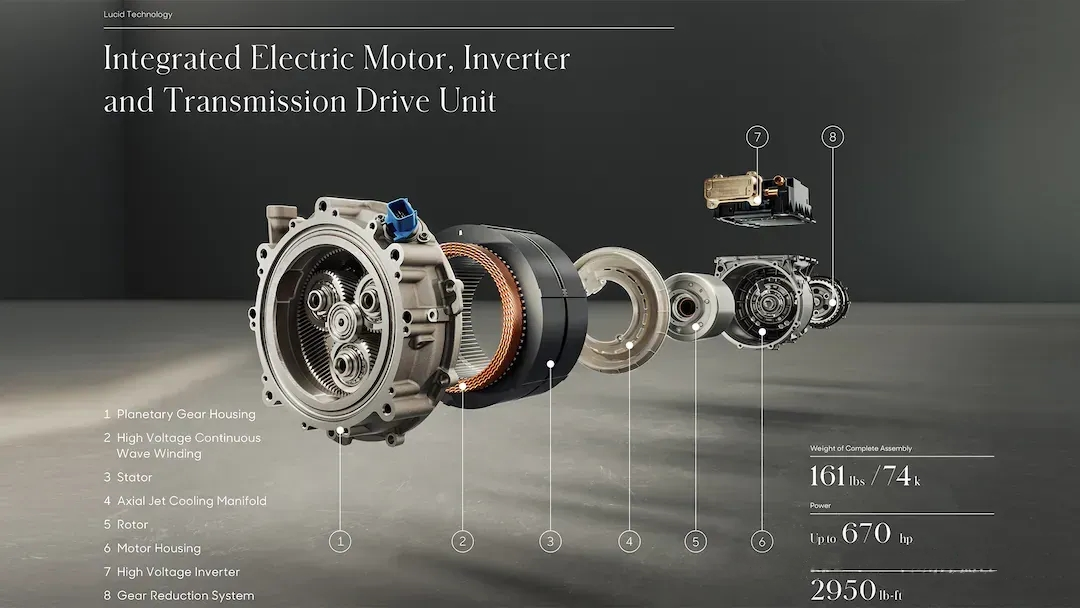
Თევზე გამყოფი მოტორი არის მოტორის ტიპი, რომელიც იყენებს თევზე გამყოფ სისტემას თავისი ტემპერატურის რეგულირებისთვის. შედარებით ტრადიციულ ჰავას გამყოფი მოტორებს, თევზე გამყოფი მოტორები ქმნიან უფრო ეფექტურ ცხადვის გადაწერას და შეძლებენ სტაბილურ მუშაობას მაღალ ძალისა და მაღალ ტვირთის პირობებში.
Თევზე გამყოფი სისტემები ჩვეულებრივ იყენებენ წყალ გამყოფი (კლორინგ ეთილენ გლიკოლის მიღებით), ოილ გამყოფი ან სხვა გამყოფები, გამყოფის მეთოდებით, როგორიცაა გამყოფის ჯაქეტები, შესაბამისი გამყოფის კანალები და პირდაპირი როტორების ან სტატორების გამყოფა.
Ინჟინერებმა Lucid Motors-ში მისცეს მნიშვნელობას მაგრამ მაგნიტული "მიკრო ZONE"-ების შორის არსებობს მითითებული გამყოფის კანალები, რომლებიც შეიძლება იქნებინ გამოყოფილი გარეშე მაგნიტული ფლუქსის გავლენის. ეს კანალები შეიძლება გამოყოფილი ჰიდროკარბუნების გამოყოფა უფრო მაღალი ცხადვის გადაწერისთვის (წითელი საშუალებით). ჰიდროკარბუნები გამოვიდებიან ეს მაღალი კანალებიდან პინის მიერ, რომლებიც გამოყოფილი ჰიდროკარბუნები გამოვიდებიან წითელი საშუალებით.
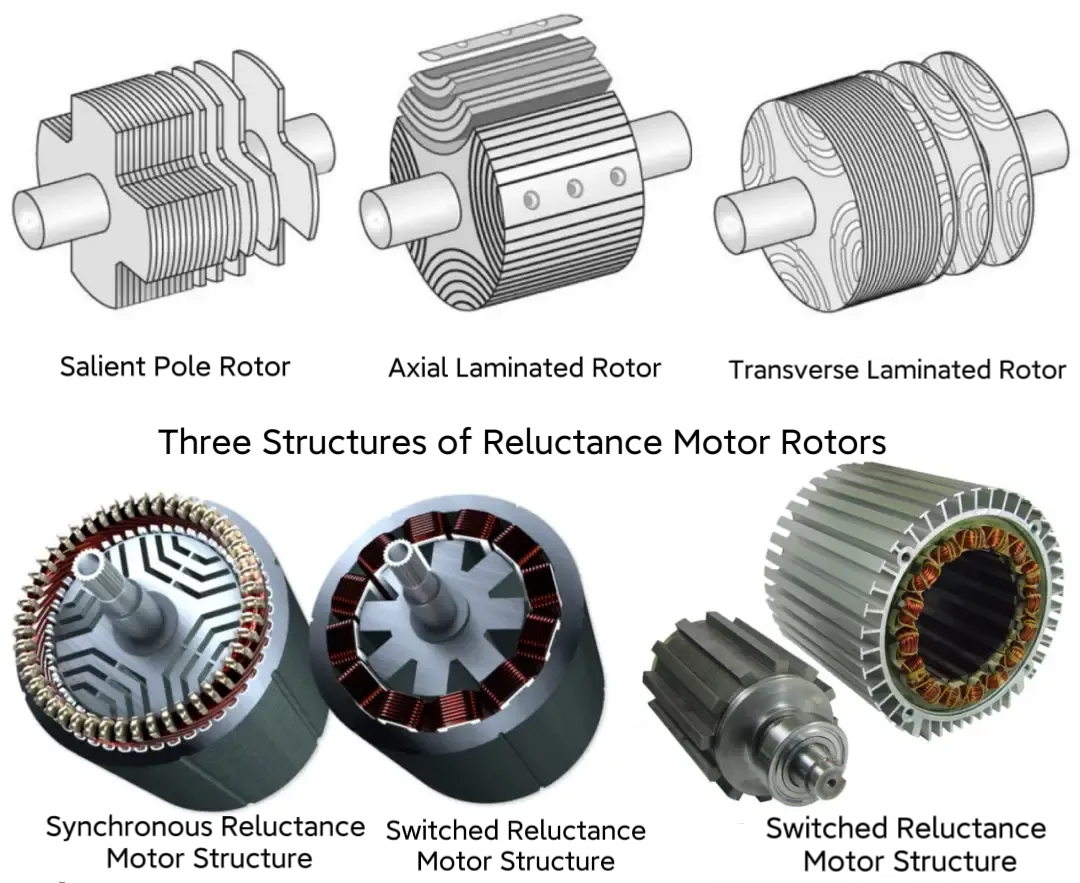
7. რელუქტანსის მოტორი
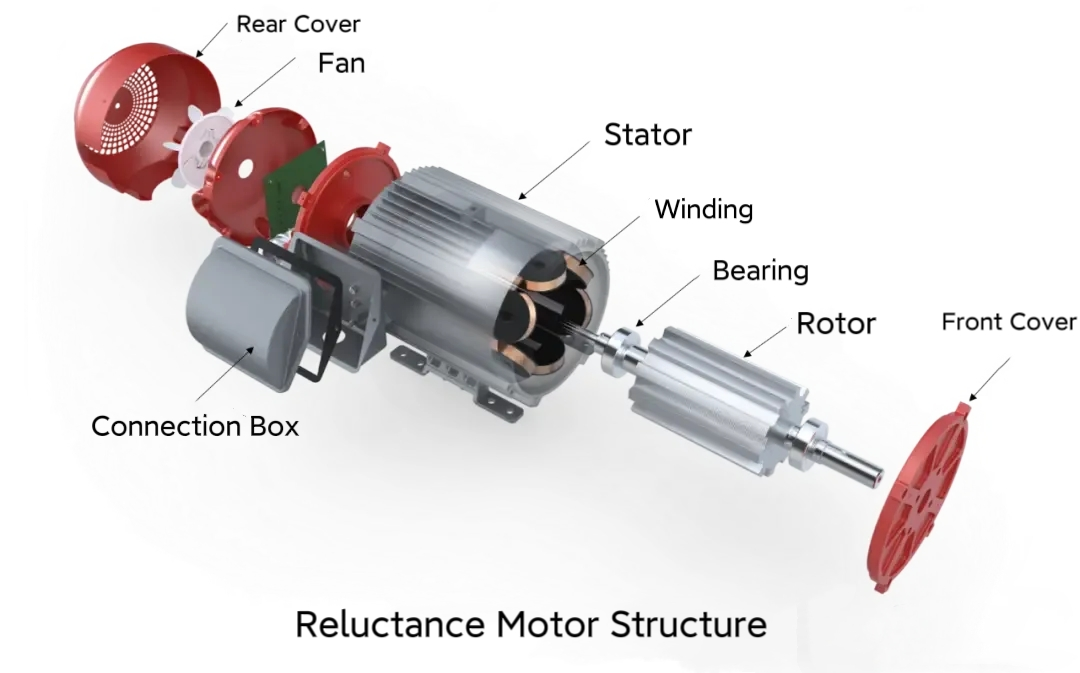
Რელუქტანსის მოტორი გენერირებს ტორყს, დაყრდნობით მაგნიტურ რელუქტანსის ხარავებზე. ის აქვს მარტივი სტრუქტურა, არ მოიცავს სანამავირო მაგნიტებს და შესაბამისია მაღალი ტემპერატურის გარემოებში. ის ეფექტურია, მัრტივი და დაბალ ღირებულების მოტორია, რაც გაკეთებს მას შესაბამისად აპლიკაციებში, სადაც საჭიროა მაღალი ტორყის სიმკვრვა და ენერგიის ეფექტივურობა.
Რელუქტანსის მოტორები ჩანაწერილია ორ კატეგორიაში: სინქრონული რელუქტანსის მოტორები (SynRM) და გადართული რელუქტანსის მოტორები (SRM).
8. სტეპის მოტორი
Სტეპის მოტორი არის დისკრეტული კონტროლის მოტორი, სადაც როტორი თითოეულ ელექტრო იმპულსის შემდეგ როტირება მუდმივი კუთხით (სტეპის კუთხით), რაც საშუალებას ძალენს ზუსტი პოზიციის კონტროლისთვის. Მთავარი მახასიათებლები :
Ზუსტი პოზიციონირება გამოყენებისგან გარეშე რევერსულ სისტემას.
• Მაღალი ტორქი და სტაბილური დაბალ სიჩქარის მუშაობა
Საჭიროა ზუსტ კონტროლისთვის გამოყენებისთვის.
• Მარტივი სტრუქტურა და დაბალი ღირებულება
Გამოყენებულია ინდუსტრიულ ავტომატიზაციაში და კონსუმენტურ ელექტრონიკაში. ხანგრძლივი მაგნიტის (PM) სტეპერის მоторები, ცვლადი წყაროების (VR) სტეპერის მოტორები და ჰიბრიდული (HB) სტეპერის მოტორები.
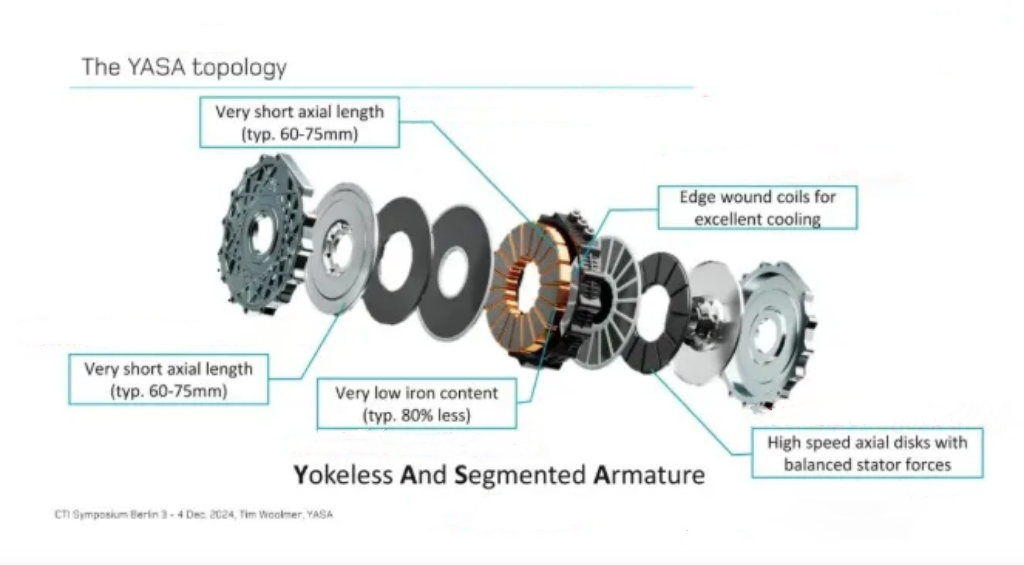
9. ღერ Gaussian მოტორი
Ღერის ფლუქსის მოტორი არის სპეციალური მოტორის ტოპოლოგია, სადაც მაგნიტული ფლუქსის მიმართულება პარალელურია მოტორის ღერის მიმართულებისთვის, რაც განსხვავდება تقليსიური რადიალური ფლუქსის მოტორებისგან (სადაც ფლუქსი პერპენდიკულარულია ღერის მიმართულებისთვის).
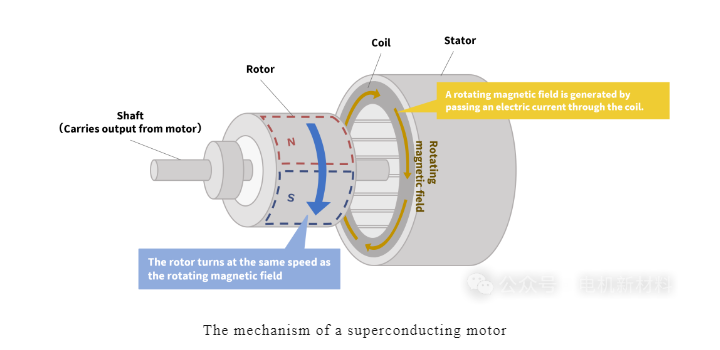
10. სუპერწინაობის მოტორი
Სუპერწინაობის მოტორი არის მოტორის ტიპი, რომელიც გამოიყენება სუპერწინაობის მასალებს როგორც ჩრდილოეთი ან როტორის კომპონენტები. ტრადიციულ მოტორების შედარებით, ის მაღალი ძალის სიმკვრივეს, უფრო დიდი ეფექტიურობას და დაბალი გამონაკლებების მქონდება.
Სუპერწინავი მასალები დახვეწის ნულოვან ელექტროგანათლებას და სრულყოფას დიამაგნიტურობას (მეისნერის ეფექტი) დაბალ ტემპერატურებზე გამოჩნდებიან, რაც შესაძლებლობას გაძლევს მოტორებს საკმარისად შემცირებულ მiedის დაკარგვას და რკინავის დაკარგვას, რაც გაუმჯობეს ენერგიის გარდაქმნის ეფექტივობას.
Სუპერწინავი მოტორები შეძლებენ მისაღებად ლეგვი წონა, მცირე ზომები და მაღალი ძალა ერთდროულად.



 Გამარჯვებული ახალიები
Გამარჯვებული ახალიები





