Comparés aux moteurs à courant continu traditionnels avec balais (BDC), les moteurs sans balais (BLDC) éliminent les commutateurs et balais mécaniques, offrant des avantages tels qu'une efficacité plus élevée, une durée de vie plus longue, un bruit plus faible et moins d'entretien. Par conséquent, ils sont largement utilisés dans les véhicules électriques, les drones,
à la maison les appareils ménagers, l'automatisation industrielle, le matériel médical et d'autres domaines.
5. Moteur à Courant Continu avec Brosses (BDC)
Un BDC est un moteur à courant continu qui réalise la commutation par l'intermédiaire d'un commutateur mécanique (brosses et collecteur). Il repose sur le contact entre les brosses en carbone et le collecteur pour changer continuellement la direction du courant, entraînant ainsi la rotation du rotor.
Bien que les BDC soient progressivement remplacés par les BLDC dans certaines applications, ils sont encore largement utilisés dans de nombreux dispositifs industriels et grand public en raison de leur faible coût, de leur contrôle simple et de leur couple de démarrage élevé.
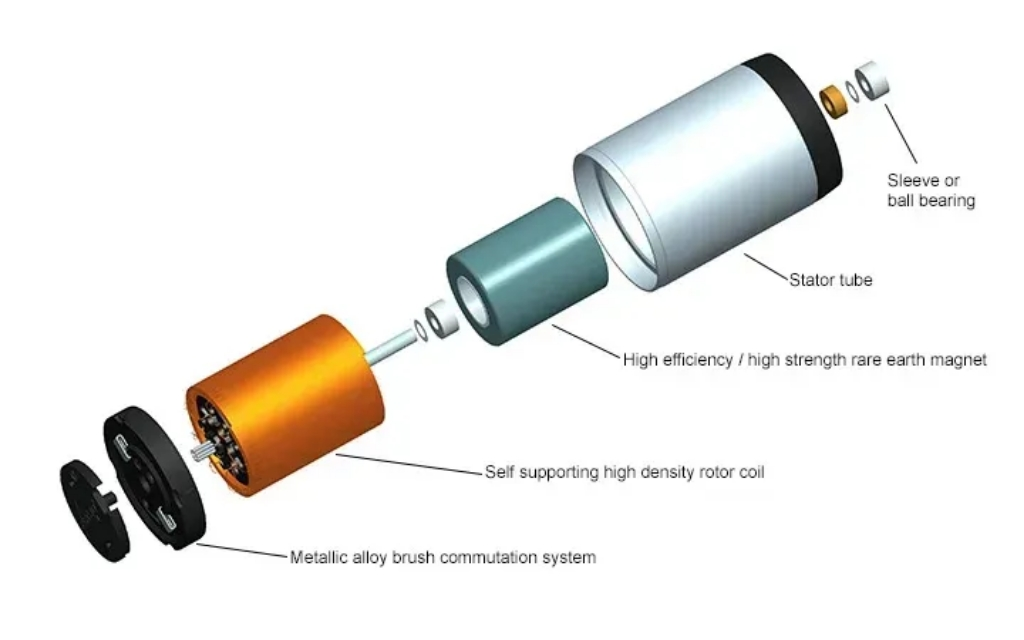
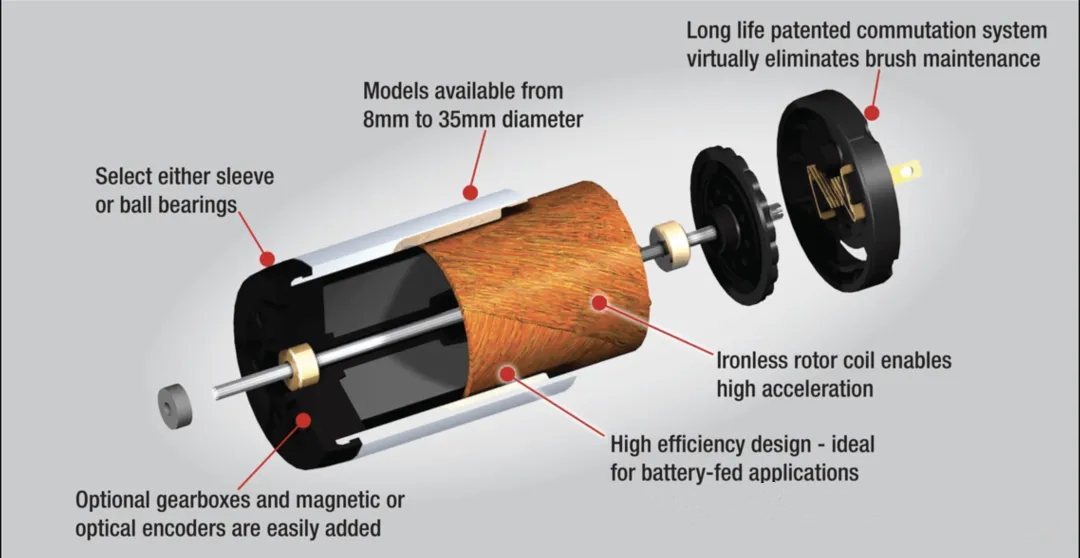
La technologie du moteur à courant continu brossé présentée dans le diagramme provient d'une conception basée sur un rotor sans fer (bobines autportantes), combinée avec un système de commutation en métal noble ou en carbone-cuivre et des aimants en terre rare ou en alnico.
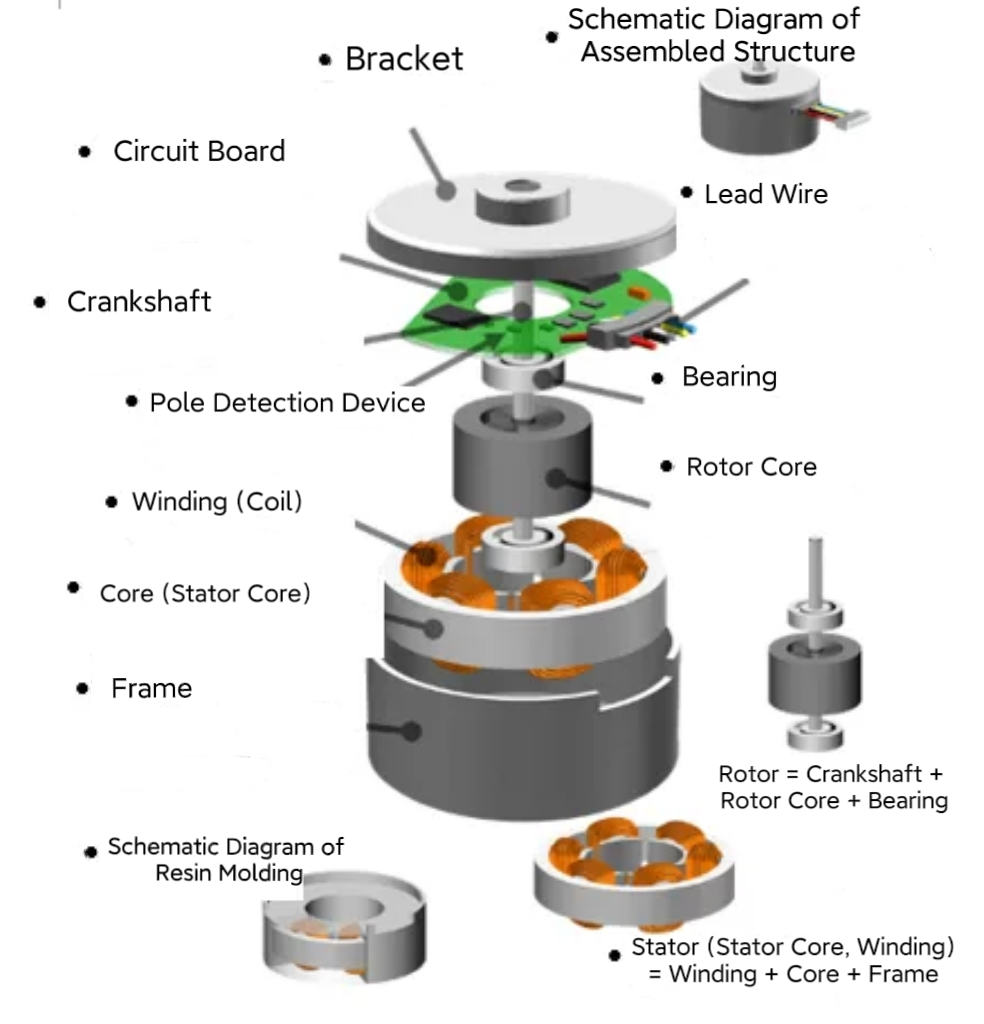
Diagramme du moteur à courant continu
Tous les moteurs à courant continu se composent de trois sous-composants principaux :
3. Rotor
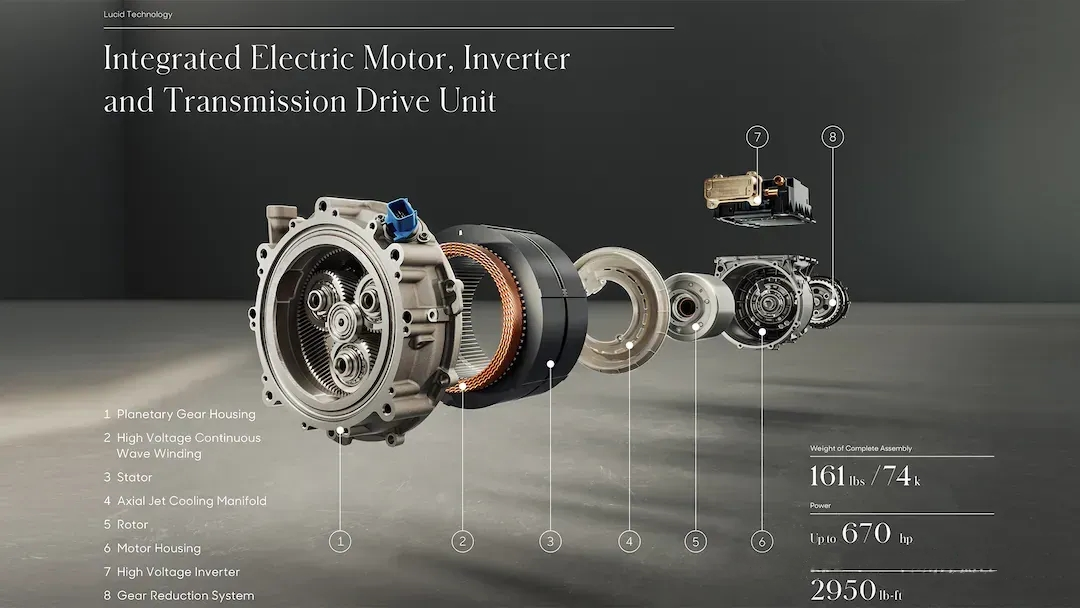
6. Moteur refroidi par liquide
Un moteur refroidi par liquide est un type de moteur qui utilise un système de refroidissement liquide pour réguler sa température. Comparé aux moteurs traditionnels refroidis par air, les moteurs refroidis par liquide présentent une efficacité de dissipation de chaleur supérieure et peuvent maintenir une opération stable sous des conditions de haute puissance et de forte charge.
Les systèmes de refroidissement liquide utilisent généralement un refroidissement à l'eau (y compris des solutions d'glycol éthylique), un refroidissement à l'huile ou d'autres fluides frigorigènes, avec des méthodes de refroidissement telles que des gaines de refroidissement, des canaux de refroidissement intégrés et un refroidissement direct des rotors ou des stators.
Les ingénieurs chez Lucid Motors pensent qu'il existe des zones magnétiques étroites "mortes" entre les enroulements, où des canaux de refroidissement fins peuvent être créés sans affecter le flux magnétique. Ces canaux permettent au fluide de refroidissement de retirer plus de chaleur des zones proches de la source de chaleur (à l'intérieur du cuivre). L'huile s'écoule hors de ces canaux étroits par des micro-perforations, aspergeant l'huile sur les enroulements en cuivre exposés.
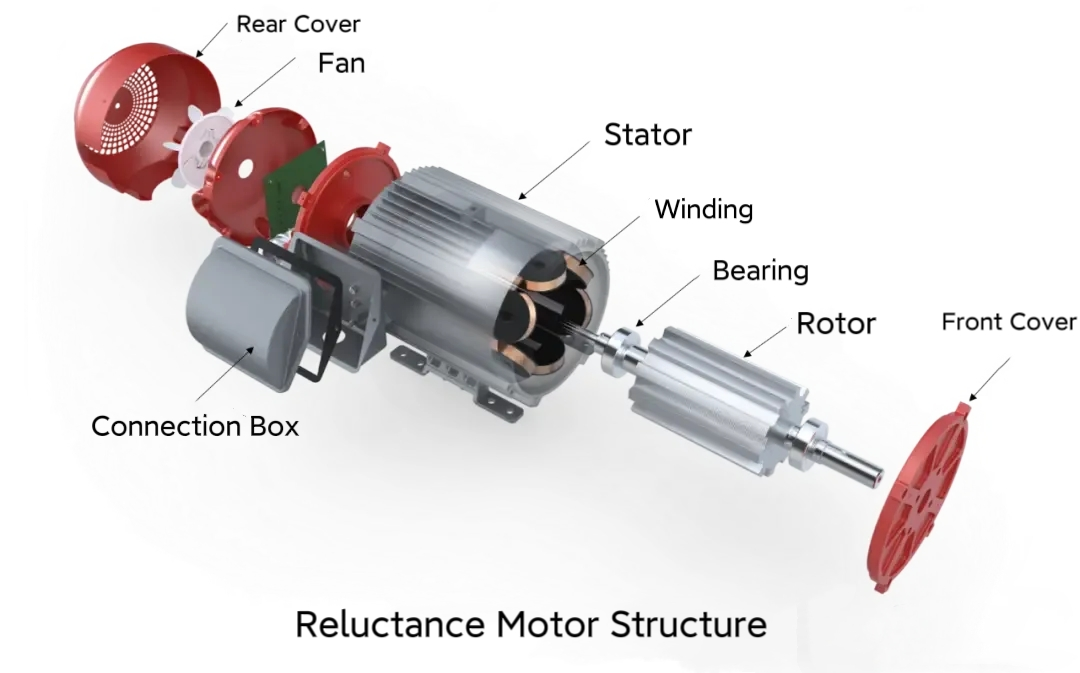
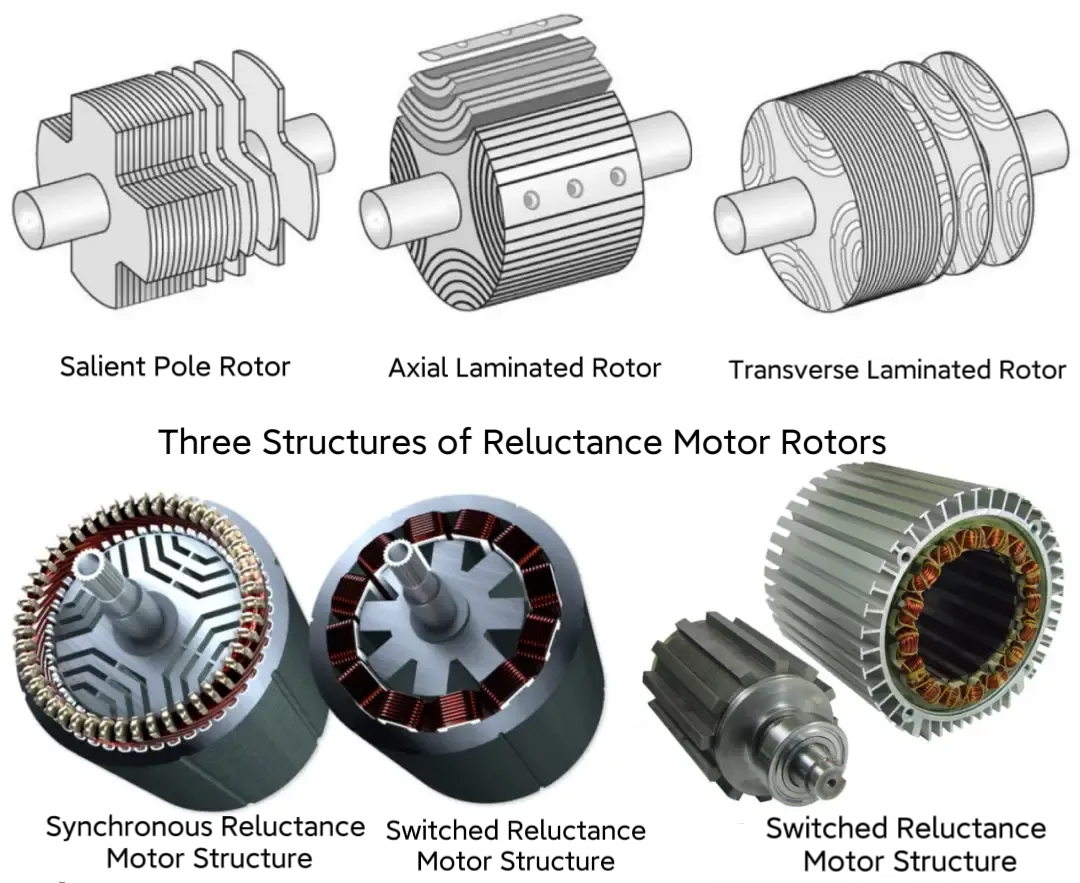
7. Moteur à réluctance
Un moteur à réluctance génère un couple en s'appuyant sur les caractéristiques de réluctance magnétique. Il a une structure simple, n'a pas besoin d'aimants permanents et est adapté aux environnements à haute température. Il est efficace, fiable et peu coûteux, ce qui le rend adapté pour des applications nécessitant une forte densité de couple et une efficacité énergétique.
Les moteurs à réluctance sont généralement divisés en deux catégories : Moteurs Synchrones à Réluctance (SynRM) et Moteurs à Réluctance Commutée (SRM).
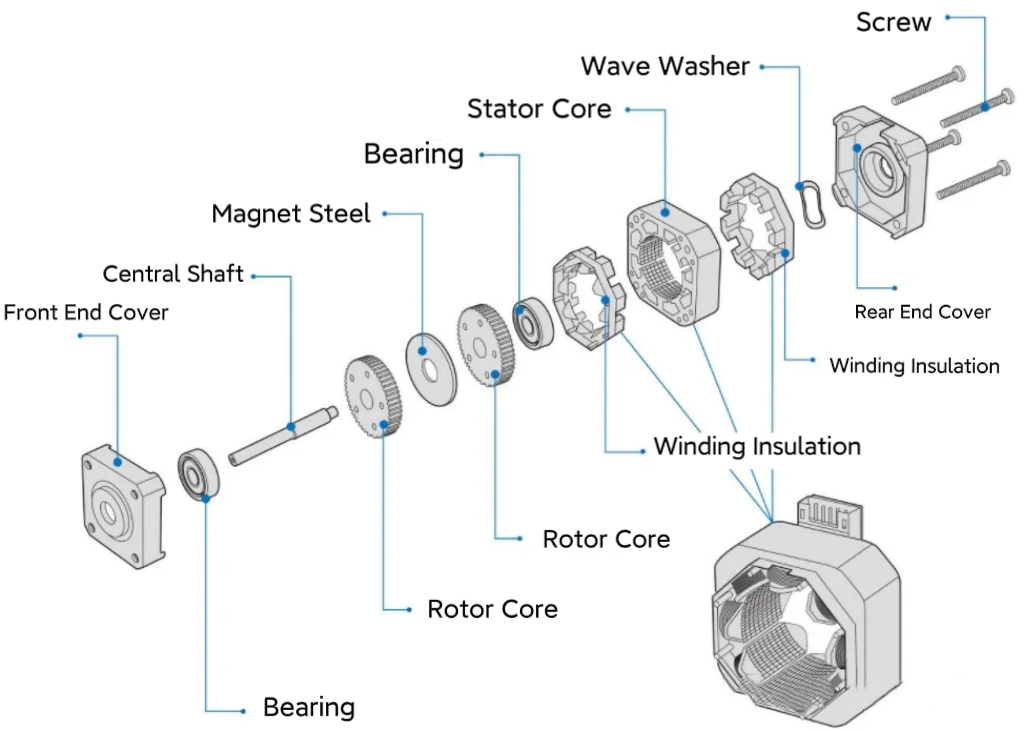
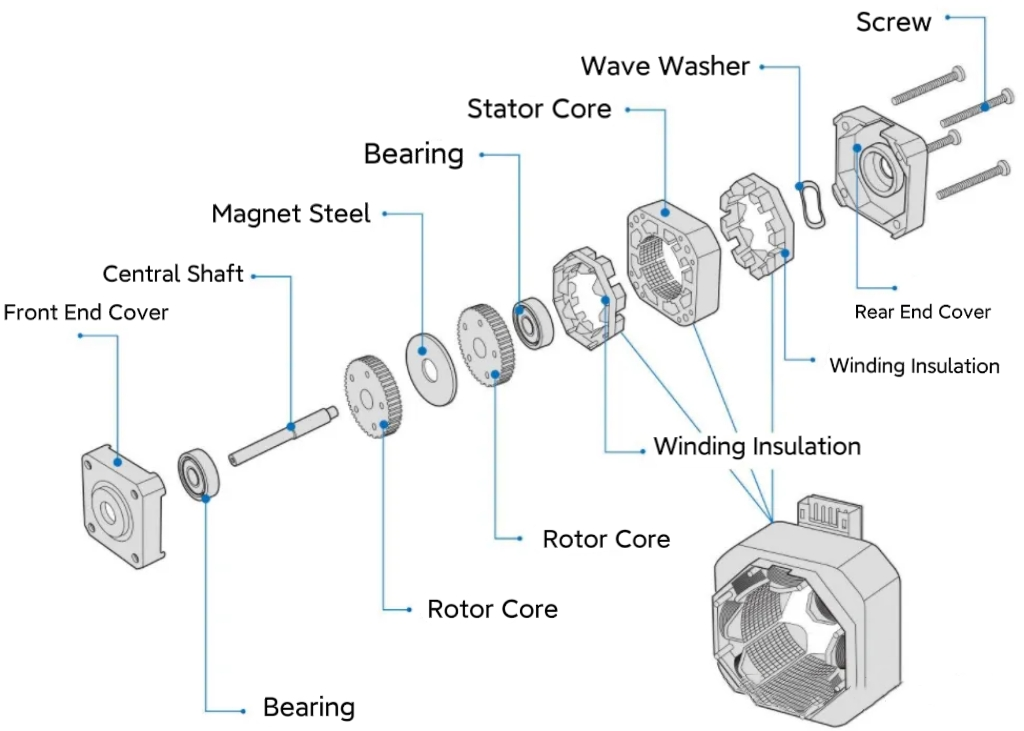
8. Moteur pas à pas
Un moteur pas à pas est un moteur de contrôle discret où le rotor tourne d'un angle fixe (angle de pas) avec chaque impulsion électrique entrante, permettant un contrôle de position précis. Caractéristiques principales :
• Contrôle en boucle ouverte
Positionnement précis sans système de rétroaction.
• Couple élevé et fonctionnement stable à faible vitesse
Adapté aux applications nécessitant un contrôle précis.
• Structure simple et coût faible
Couramment utilisé dans l'automatisation industrielle et les appareils électroniques grand public. Les types courants de moteurs pas à pas incluent les moteurs pas à pas à Aimant Permanent (PM), les moteurs pas à pas à Réticence Variable (VR) et les moteurs pas à pas Hybrides (HB).
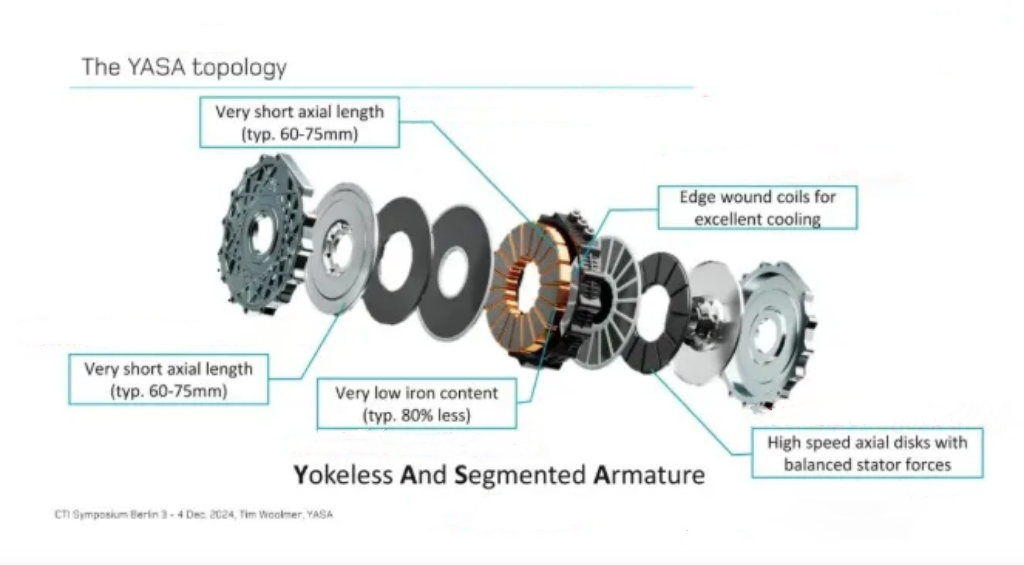
9. Moteur à flux axial
Un moteur à flux axial est une topologie de moteur spéciale où la direction du flux magnétique est parallèle à l'arbre du moteur, différant des moteurs à flux radial traditionnels (où le flux est perpendiculaire à l'arbre).
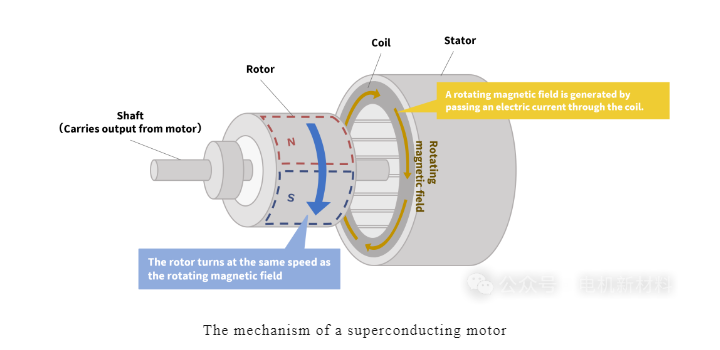
10. Moteur à supraconducteur
Un moteur à supraconducteur est un type de moteur qui utilise des matériaux supraconducteurs comme enroulements ou composants de rotor. Comparé aux moteurs traditionnels, il présente une densité de puissance plus élevée, une efficacité accrue et des pertes réduites.
Les matériaux supraconducteurs présentent une résistance électrique nulle et un diamagnétisme parfait (effet Meissner) à basses températures, permettant aux moteurs de réduire considérablement les pertes de cuivre et de fer tout en améliorant l'efficacité de conversion d'énergie.
Les moteurs supraconducteurs peuvent atteindre à la fois un poids léger, une petite taille compacte et une grande puissance simultanément.



 Actualités à la Une
Actualités à la Une





